

Лабораторная работа №3 Изучение законов вращательного движения с помощью маятника Обербека
Студент должен знать: Величины, характеризующие кинематику вращательного движения, момент инерции и единицы его измерения. Момент инерции различных тел (с выводом формул для стержня, тонкого кольца, тонкой сферы и др.). Момент силы (векторная форма записи), направление и единицы его измерения. Основное уравнение динамики вращательного движения. Закон сохранения момента количества движения (привести примеры использования его на практике). Сочленения и рычаги в опорно-двигательном аппарате человека. Центрифугирование.
Студент должен уметь: Работать с экспериментальной установкой, пользоваться формулами для подсчета измеряемых величин в международной системе единиц СИ, производить оценку погрешностей измерений.
Краткая теория
Простейшим
случаем вращательного движения является
вращение твердого тела вокруг неподвижной
оси. При этом все точки тела описывают
окружности, центры которых лежат на
одной прямой, являющейся осью вращения.
Вращательное движение удобно
характеризовать углом поворота «»,
угловой скоростью «![]() »,
т.к. все токи при таком вращении
поворачиваются на один и тот же угол
«», движутся с
одинаковой угловой скоростью «
»,
т.к. все токи при таком вращении
поворачиваются на один и тот же угол
«», движутся с
одинаковой угловой скоростью «![]() ».
».
Аналогом величин, характеризующих поступательное движение во вращательном движении вокруг неподвижной оси являются:
1) пройденный путь S - угол поворота ;
2)
линейная скорость
= dS/dt
- угловая скорость
![]() = d/dt;
= d/dt;
3)
ускорение
![]() - угловое ускорение
- угловое ускорение
![]() ;
;
4) масса тела m - момент инерции J вращающейся материальной точки массой m относительно оси неподвижной оси на расстоянии r:
J
= mr2 , а для любого тела -
 ;
;
5)
сила
![]() - момент силы
- момент силы
![]() ,
характеризующий вращающее действие
силы;
,
характеризующий вращающее действие
силы;
6)
импульс тела
![]() -
момент импульса тела
-
момент импульса тела
![]() .
.
Рассмотрим некоторые из названных и другие величины
Угловая
скорость
![]() - вектор, численно равный d
/ dt и направленный по оси вращения по
правилу правого винта (если рукоятку
правого винта вращать по направлению
вращения тела, то направление
поступательного движения винта покажет
направление угловой скорости). Единицей
измерения
- вектор, численно равный d
/ dt и направленный по оси вращения по
правилу правого винта (если рукоятку
правого винта вращать по направлению
вращения тела, то направление
поступательного движения винта покажет
направление угловой скорости). Единицей
измерения
![]() является [
является [![]() ]
= 1 рад/с (с-1). Если
вращение происходит с постоянной угловой
скоростью (
]
= 1 рад/с (с-1). Если
вращение происходит с постоянной угловой
скоростью (![]() =const),
то
=const),
то
![]() =(
-0)/t,
отсюда = 0
+
=(
-0)/t,
отсюда = 0
+
![]() t.
Угловую скорость можно выразить следующим
образом:
t.
Угловую скорость можно выразить следующим
образом:
![]() = 2 / T = 2n,
где n=1/T - число оборотов в секунду,
Т- период вращения.
= 2 / T = 2n,
где n=1/T - число оборотов в секунду,
Т- период вращения.
При изменении угловой скорости вводят понятие углового ускорения:
![]() []
= 1 рад/с2 (1/с2).
[]
= 1 рад/с2 (1/с2).
Угловое
ускорение
![]() - вектор, совпадающий по направлению
с угловой скоростью при ускоренном
движении и противоположной ей – при
замедленном. Угловое ускорение связано
с тангенциальным (касательным) ускорением
- вектор, совпадающий по направлению
с угловой скоростью при ускоренном
движении и противоположной ей – при
замедленном. Угловое ускорение связано
с тангенциальным (касательным) ускорением
![]() :
:
![]()
Т.к.
![]() ,
то
,
то
![]() ,
,
где
![]() -
линейная скорость
-
линейная скорость
Для характеристики динамики вращательного движения вводятся понятия момента силы и момента инерции.
Рассмотри
движение материальной точки "А"
с массой m по окружности радиусом r
(рис. 1). Пусть на точку "А" массой
m действует сила
![]() ,
лежащая в плоскости, перпендикулярной
оси вращения О. Тогда точка приобретает
постоянное тангенциальное ускорение
а,
определяемое тангенциальной составляющей
силы
,
лежащая в плоскости, перпендикулярной
оси вращения О. Тогда точка приобретает
постоянное тангенциальное ускорение
а,
определяемое тангенциальной составляющей
силы
![]() :
:
F
= F Sin
= m![]() (1)
(1)
Так
как
![]() =
r.
Равенство (1) можно записать следующим
образом:
=
r.
Равенство (1) можно записать следующим
образом:
F Sin = mr (2)
Умножив правую и левую часть равенства (2) на r получим:
Fr Sin = mr2 или M =J , отсюда:
![]() /J,
(3)
/J,
(3)
где
М=FrSin или
в векторной форме:
![]() =
[
=
[![]() ]
- вращающий момент (момент силы
]
- вращающий момент (момент силы
![]() ),
),
J=mr2 - момент вращения материальной точки А массой m относительно оси «О».
Зависимость
![]() =
=
![]() /J
является вторым законом Ньютона для
вращательного движения и называется
основным уравнением динамики
вращательного движения.
/J
является вторым законом Ньютона для
вращательного движения и называется
основным уравнением динамики
вращательного движения.
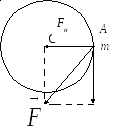
Рис. 1.
Вращение материальной точки А массой m относительно оси «О»
Это
же выражение справедливо и для
характеристики вращательного движения
твердого тела с учетом того, что J -
момент инерции тела, характеризующий
его инерционное свойство во вращательном
движении относительно какой-либо оси.
Для определения момента инерции твердого
тела необходимо разбить тело на бесконечно
малые элементы с массой dm,
найти моменты инерции каждого элемента
dJ и проинтегрировать
их. Каждый элемент можно приближенно
принять за материальную точку c
![]() ,
тогда:
,
тогда:
 или
или
![]() (4)
(4)
Для тел различной геометрической формы момент инерции рассчитывается по формулам; полученным при интегрировании выражения (4), например:
1) для однородного сплошного цилиндра (диска) относительно продольной оси
J=mR2/2, где m - масса цилиндра, R - его радиус;
2) для однородного сплошного цилиндра (стержня) относительно поперечной оси, проходящей через его середину
![]() ,
где m – масса стержня,
l – его длина.
,
где m – масса стержня,
l – его длина.
3)
для однородного шара радиуса R
, массой m
относительно оси, проходящей через
его середину
![]()
4) для тонкого однородного кольца (обруча) радиуса R массой m относительно оси, проходящей через центр перпендикулярно к плоскости кольца J = mR2 и т.д.
Основное
уравнение динамики вращательного
движения тела можно записать в ином
виде, учитывая, что
![]() ,
,
![]() или
или
![]() (5)
(5)
Величина
![]() dt
называется импульсом момента сил,
приложенных к телу, а d(
dt
называется импульсом момента сил,
приложенных к телу, а d(![]() )
- изменение момента количества движения
тела (момента импульса тела).
)
- изменение момента количества движения
тела (момента импульса тела).
Приведенное равенство (5) показывает, что изменение момента количества движения вращающегося тела равно импульсу момента приложенных к нему сил.
Если
![]() =О,
то d(
=О,
то d(![]() )=
0 или J
)=
0 или J![]() = const , т.е. момент количества движения
остается постоянным.
= const , т.е. момент количества движения
остается постоянным.
Это
следствие называется законом сохранения
момента количества движения: если
сумма моментов сил
![]() ,
действующих на тело, равна нулю (
,
действующих на тело, равна нулю (![]() = 0), то момент импульса тела
= 0), то момент импульса тела
![]() остается постоянным (
остается постоянным (![]() =
const). Например, при выполнении «сальто»
в прыжке человек «группируется», прижимая
голову и ноги друг к другу, тем самым
снижает момент инерции J
своего тела; а так как
=
const). Например, при выполнении «сальто»
в прыжке человек «группируется», прижимая
голову и ноги друг к другу, тем самым
снижает момент инерции J
своего тела; а так как
![]() =
const, то угловая скорость вращения тела
=
const, то угловая скорость вращения тела
![]() повышается и, следовательно, время
переворота человека уменьшается.
повышается и, следовательно, время
переворота человека уменьшается.
Изучение законов вращательного движения в лабораторной работе производится с помощью маятника Обербека, который представляет собой крестовину, состоящую из 4-х стержней каждый длиной l/2, прикрепленных к втулке с осью (рис.2).
На стержнях фиксируются грузы массой m1, которые могут быть закреплены симметрично на различных расстояниях от оси вращения. На шкив радиусом r, находящийся на оси вращения, наматывается нить, к свободному концу которой прикрепляется груз массой m.
Если предоставить грузу массой m возможность двигаться, то это падение будет происходить с ускорением а. При этом шкив со стержнями и расположенными на них грузами будет вращаться с угловым ускорением , которое можно найти, измерив высоту h и время падения груза t.
![]() (6)
(6)
где r - радиус шкива, на который наматывается нить.
Силой,
создающей вращающий момент, является
сила натяжения нити Т. Из второго
закона Ньютона для груза Р следует
![]() +
+![]() =m
=m![]() .
Переходя от векторной суммы к
алгебраической, проектируя на ось ОХ
имеем: mg - Т = ma,
откуда
.
Переходя от векторной суммы к
алгебраической, проектируя на ось ОХ
имеем: mg - Т = ma,
откуда
T = mg - ma = m(g-a) . (7)
Тогда вращающий момент
M = Tr = m(g-a)r . (8)
Момент инерции маятника может быть определен из основного уравнения вращательного движения:
J = M/ . (9)
Подставляя в формулу (9) формулы (5) и (7) получим окончательное выражение для момента инерции маятника Обербека, определенного практически (экспериментально:
 .
(10)
.
(10)
С
другой стороны, теоретически, момент
инерции маятника может быть найден из
формулы Jтеорет
![]() Jk + 4Jrp
(моментом инерции цилиндра радиуса r
пренебрегаем), где Jk -
момент инерции крестовины, Jrр
- момент инерции груза относительно оси
вращения. Считая груз материальной
точкой массой m1, его момент
инерции можно найти по формуле Jrp=
m1R2, где R
- расстояние от оси вращения до центра
масс груза.
Jk + 4Jrp
(моментом инерции цилиндра радиуса r
пренебрегаем), где Jk -
момент инерции крестовины, Jrр
- момент инерции груза относительно оси
вращения. Считая груз материальной
точкой массой m1, его момент
инерции можно найти по формуле Jrp=
m1R2, где R
- расстояние от оси вращения до центра
масс груза.
Тогда момент инерции крестовины теоретически определяется по формуле:
![]()
где m2 - масса «двойного» стержня, l – его длина (см. рис.2).
![]()
![]() (11)
(11)