

Динамика точки и системы / ДИНАМИКА
.pdfСумма произведений массы каждой частицы тела на квадрат расстояния этой частицы от данной плоскости называется моментом инерции тела относительно этой плоскости.
N |
N |
|
JOxy = mk zk2 ; |
JOyz = mk xk2 ; |
|
k =1 |
k =1 |
(9) |
|
|
N
JOxz = mk yk2 . k =1
JO = JOxy +JOyz +JOxz. |
(10) |
81

J |
= M 2. |
(11) |
l |
|
|
Радиус инерции:
= |
|
Jl |
|
(12) |
|
M |
|||
|
|
|
Радиус инерции представляет собой расстояние от данной оси до такой точки, в которой нужно сосредоточить всю массу тела, чтобы момент инерции этой сосредоточенной массы был бы равен моменту инерции тела относительно данной оси.
82
Центробежные моменты инерции:
J xy = J yx
J yz = J zy
J zx = J xz
N
=
k =1
N
=
k =1
N
=
k =1
mk xk yk ;
mk yk zk ; |
(13) |
mk zk xk .
83
Ось z - главная ось инерции тела в данной точке, если
Jxz = Jyz = 0, то– главная ось инерции.
Ось z - главная центральная ось инерции тела а данной точке, если Jxz = Jyz = 0, zc=0.
84
1.Если тело имеет ось материальной симметрии, то эта ось является главной центральной осью инерции этого тела.
2.Если тело имеет плоскость материальной симметрии, то любая прямая, перпендикулярная этой плоскости, является главной осью инерции тела в точке пересечения прямой с плоскостью симметрии.
85
3.12. Примеры вычисления моментов инерции
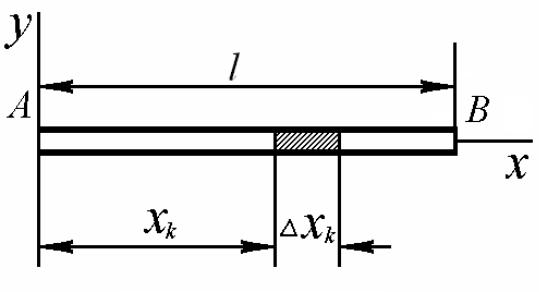
Момет инерции прямоугольного стержня, относительно точки А (его конца):
N |
|
J A = mk xk2 |
(1) |
k =1 |
86 |

Линейная плотность стержня:
Масса тk :
= Ml
mk = Ml xk
|
M |
N |
2 |
|
|
J A = |
|
xk |
xk |
(2) |
|
|
l |
k =1 |
|
|
|
|
|
|
87 |
||
|
|
|
|
|
|
|
M |
N |
|
|
M |
l |
|
|
|
2 |
|
|
2 |
|
|
||
J A = |
|
Nlim→ xk |
xk |
= |
|
x |
dx |
(3) |
l |
l |
|||||||
|
|
xk →0 k =1 |
|
|
|
0 |
|
|
J A |
= |
1 |
Ml2 |
(4) |
|
||||
|
|
3 |
|
|
Момент инерции стержня, относительно его центра масс
J |
|
= |
1 |
Ml 2 |
C |
|
|||
|
12 |
|
||
|
|
88 |
||
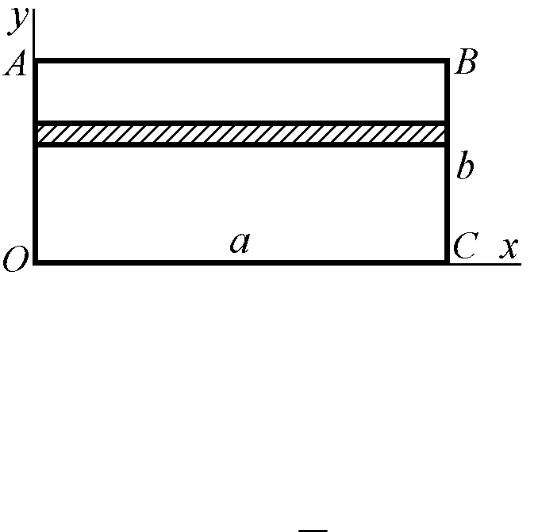
2. Прямоугольник.
Момент инерции элементарной полоски относительно оси
у :
13 mk a2
89
Момент инерции всего прямоугольника — сумма моментов инерции полосок:
N |
1 |
|
|
|
|
|
|
|
1 |
|
N |
|
J y = |
mk a2 = |
a2 |
mk (6) |
|||||||||
|
|
|||||||||||
k =1 |
3 |
|
|
|
|
|
|
3 |
k =1 |
|||
|
J |
|
= |
|
1 |
Ma2 |
(7) |
|||||
|
y |
|
|
|||||||||
|
|
|
3 |
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
J |
|
= |
1 |
Mb2 |
(8) |
||||||
|
x |
|
||||||||||
|
|
|
3 |
|
|
|
||||||
|
|
|
|
|
|
|
||||||
90