

Динамика точки и системы / ДИНАМИКА
.pdf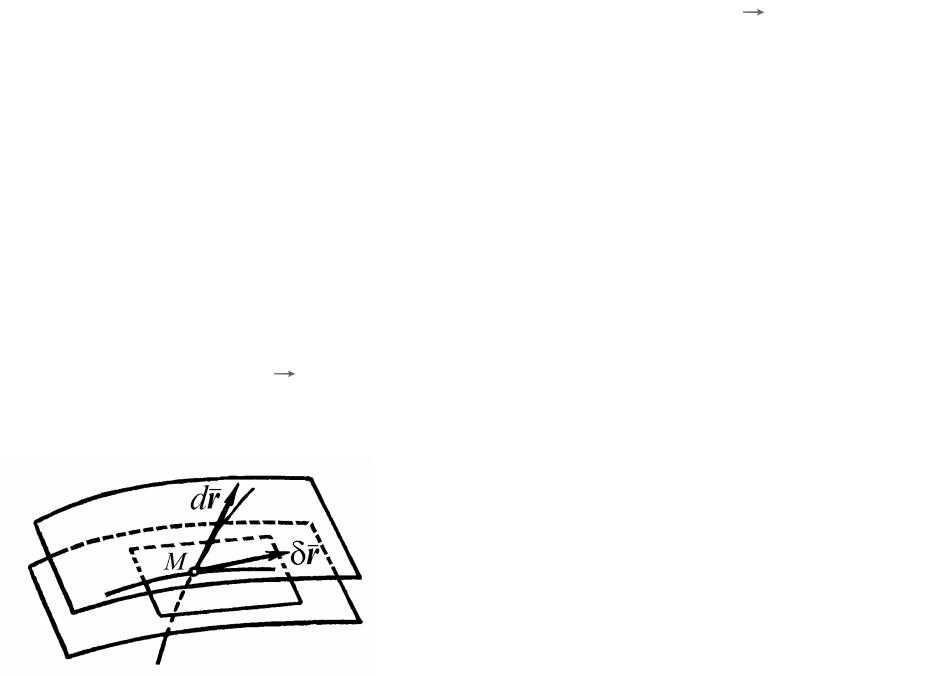
dr
Действительное же перемещение можно рассматривать как результат двух движений: переносного – вместе с изменяющейся поверхностью (связью) – и относительного движения точки относительно фиксированной в данный момент времени поверхности. Поэтому в случае нестационарной связи действительное перемещение не
совпадает ни с одним из возможных перемещений |
. |
r |
|
Если же связь стационарная, то уравнение связи f(x, y, z) = 0, можно рассматривать как поверхность, которая не изменяется с течением времени312 .



Действительное перемещение системы определяется совокупностью (dq1, dq2, …, dqn) действительных приращений обобщенных координат, которые получают обобщенные координаты в течение малого промежутка времени dt.
Возможное перемещение k-й точки системы можно вычислить как полный дифференциал функции
rk =rk (q1, q2, ..., qn, t)
при фиксированном времени:
rk |
n |
r |
qi |
|
= |
k |
|||
|
i=1 |
q |
|
(9) |
|
|
|
||
|
i |
315 |
||
3.52. Возможная работа силы. Идеальные связи
Возможной работой силы F называется работа силы на любом возможном перемещении
точки ее приложения: |
A(Fk ) = Fk |
r |
|
|
(1) |
||
|
|
|
Возможной работой сил F1 , F2 , ..., FN , приложенных к точкам механической системы в данный момент времени, называется работа, которую совершили бы эти силы на возможном перемещении системы:
N |
N |
|
A(Fk ) = Fk r |
(2) |
|
k =1 |
k =1 |
317 |

3.53. Обобщенные силы
Сумма работ всех сил на некотором возможном перемещении:
|
|
N |
|
|
N |
|
|
|
|
|
|
|
|
A(Fk ) = Fk rk |
|
|
|
(1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
k =1 |
|
|
|
|
|||
Возможное перемещение k-й точки |
|
|
|
|
|||||||
|
|
|
|
n |
r |
|
|
|
|
|
|
|
|
|
rk |
= |
k |
|
qi |
|
|
|
(2) |
|
|
|
q |
|
|
|
|
||||
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
В результате получим: |
|
|
|
|
|
|
|
|
|||
N |
A(F ) = |
N |
n |
|
|
|
n N |
rk |
|
|
|
|
F |
|
rk q = |
|
F |
q |
(3) |
||||
k |
k |
|
i |
|
k |
|
|
i |
|||
k =1 |
|
k =1 |
i=1 qi |
|
|
i=1 k =1 |
qi |
|
320 |
||
|
|
|
|
|
|||||||