

Отчеты -и- РГР / Отчёты / Отчёт_№3
.docНижегородский Государственный Технический Университет
Кафедра теории корабля
Доц. Грамузов Е. М.
Отчёт по лабораторной работе:
Исследование начальной остойчивости
плавучей полупогружной буровой установки
Выполнил:
Захаров А. К.
Проверил:
Савинов В. Н.
Нижний Новгород
2009 год
Ц ель
работы
ель
работы
Ознакомление студентов с особенностями остойчивости плавучих полупогружных буровых установок (ППБУ) и их поведения на взволнованной поверхности моря, изучение основных положений теории и расчета, а также ознакомление с методикой постановки эксперимента по определению параметров начальной остойчивости плавучих технических средств для освоения шельфа.
Краткие сведения из теории
Среди большого разнообразия различных геометрических форм ППБУ в настоящее время наибольшее распространение получили установки катамаранного типа, для которых характерно наличие двух горизонтальных подводных понтонов значительного водоизмещения с установленными на них вертикальными относительно тонкими стабилизирующими колоннами [1,3]. В процессе эксплуатации установка может находиться в двух основных положениях: "походном" и "рабочем", которые показаны на рис. 1.
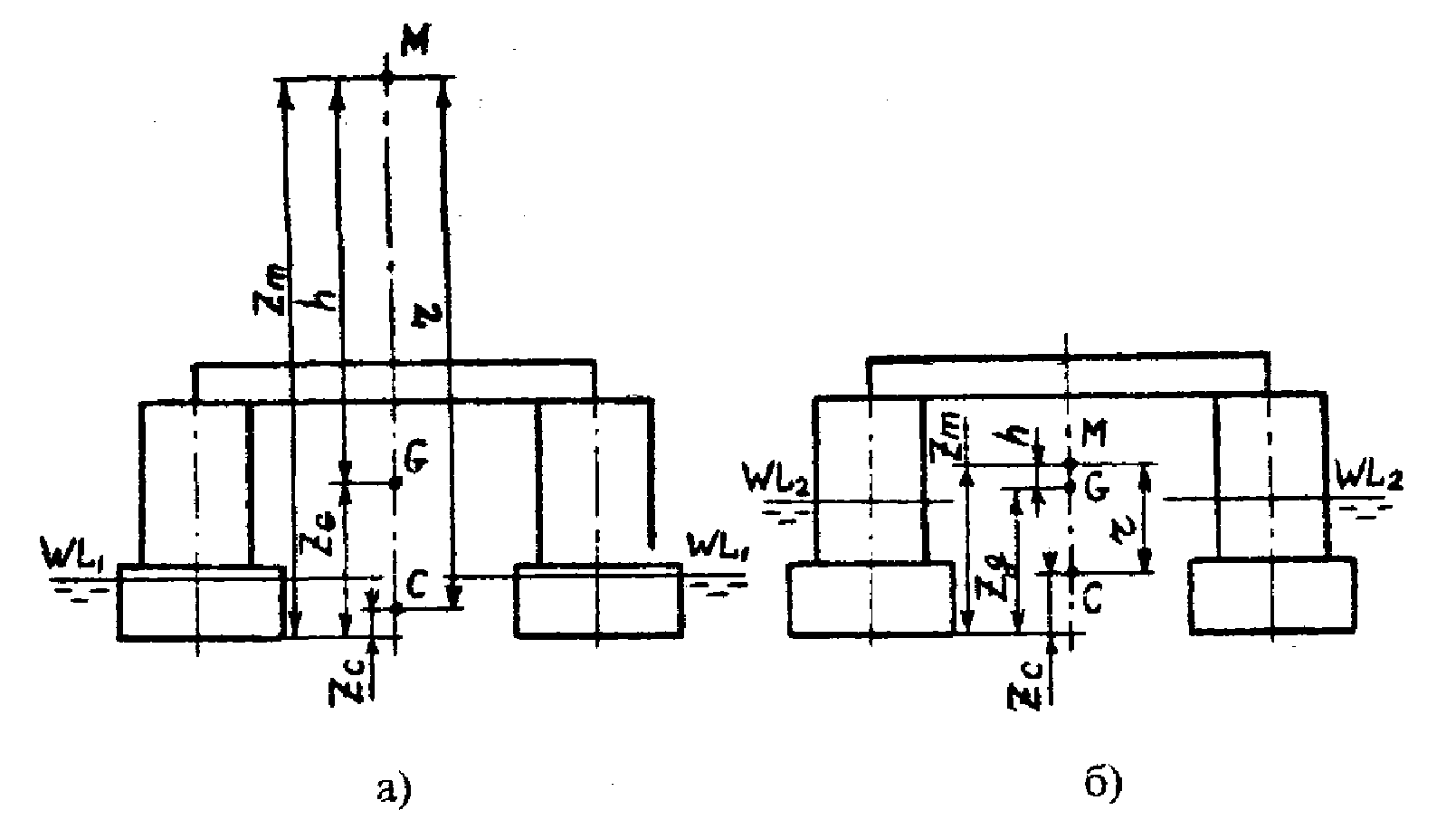
Рис.1. Походное (а) и рабочее (б) положения ППБУ;
характерные точки G, С и М - центры тяжести, величины и метацентр соответственно
Важнейшим параметром, определяющим остойчивость любого плавающего объекта, является начальная метацентрическая высота:
h = zм - zg,
где: zм – аппликата поперечного метацентра;
zg – аппликата центра тяжести плавающего объекта.
Величина zм в свою очередь определяется зависимостью
zм = r + zc,
где r = Ix / V – малый начальный метацентрический радиус;
zc – аппликата центра величины:
Ix – момент инерции площади действующей ватерлинии относительно центральной продольной оси х;
V – объемное водоизмещение.
В еличина
возмущающего момента МВ,
действующего со стороны волнения на
любой плавающий объект, в простейшем
случае определяется зависимостью:
еличина
возмущающего момента МВ,
действующего со стороны волнения на
любой плавающий объект, в простейшем
случае определяется зависимостью:
МВ = Dh,
где: – редукционный коэффициент, учитывающий взаимное соотношение размеров корпуса судна в волнения;
D – весовое водоизмещение судна;
– угол волнового склона.
Величина начальной метацентрической высоты определяет еще и такой важный параметр, как период собственных колебаний бортовой качки. Известно, что простейшая формула для его определения имеет вид:
![]()
где: Ix – момент инерции массы ППБУ относительно центральной продольной оси;
44 – момент инерции присоединенной массы жидкости при бортовой качке.
Величина вертикальной возмущающей силы fb, действующей на плавающие объекты при изменении уровня волновой поверхности и вызывающей их вертикальную качку, определяется зависимостью
fb = ·s ·,
где: – редукционный коэффициент;
– удельный вес морской воды;
S – площадь действующей ватерлинии,
– ордината волновой поверхности в районе ДП установки.
Величина S определяет период собственных колебаний вертикальной качки, который также может быть найден по следующей приближенной формуле:
![]()
где: М – масса ППБУ;
33 – присоединенная масса жидкости при вертикальной качке.
О писание
лабораторной установки
писание
лабораторной установки
На рис.2 показана геометрическая форма модели, которая обладает всеми отличительными признаками ППБУ: на двух продольных горизонтальных понтонах установлены 4 вертикальные стабилизирующие колонны с относительно небольшой площадью поперечного сечения. Все элементы конструкции жестко соединены сверху палубными связями.
Главные размерения и основные характеристики модели ППБУ:
|
Длина понтонов |
L = 10.2 дм |
|
|
Ширина понтонов |
В = 1.70 дм |
|
|
Высота борта понтонов |
Н = 0.68 дм |
|
|
Размеры сечения стабилизирующих колонн |
а b = 1.40 1.36 дм |
|
|
Расстояния между стабилизирующими колоннами: |
|
|
|
|
В продольном направлении |
I1 = 5.2 дм |
|
|
В поперечном направлении |
I2 = 4.6 дм |
|
Плечо переноса грузов: |
c1 = 3.3 дм |
|

Рис.2. Схема конструкции модели ППБУ
П роведение
работы и обработка результатов
роведение
работы и обработка результатов
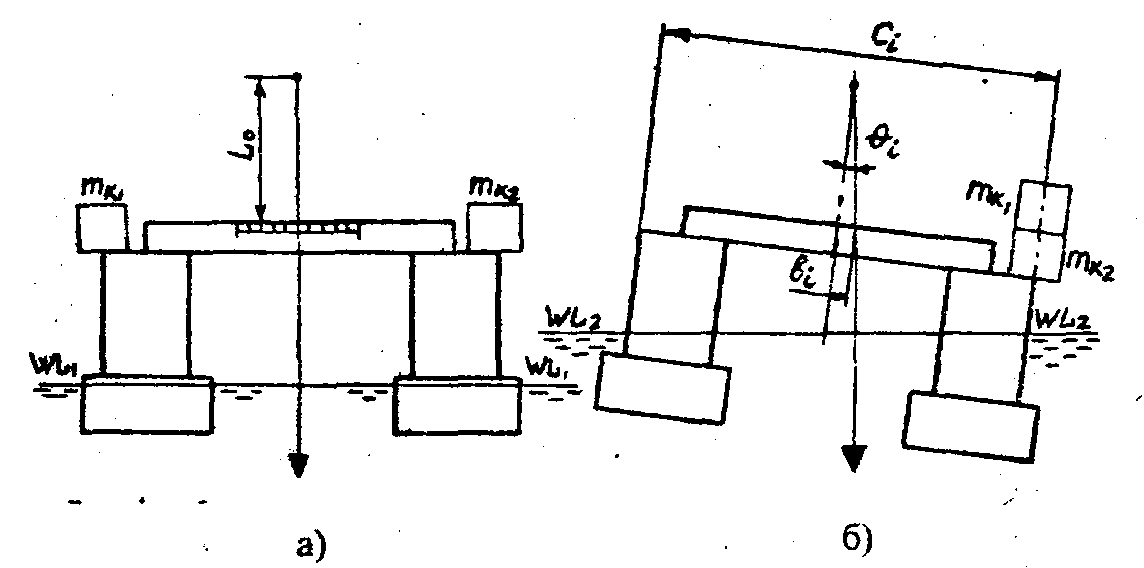
Рис.4. Опыт кренования ППБУ:
а - исходное положение кренящих грузов; б - угол крена 1 при переносе кренящих грузов в рабочем положении
Опыт кренования выполняют дважды – для походного и рабочего положения.
Для определения центра тяжести модели zg проводится проводится аналогичный опыт на воздухе.
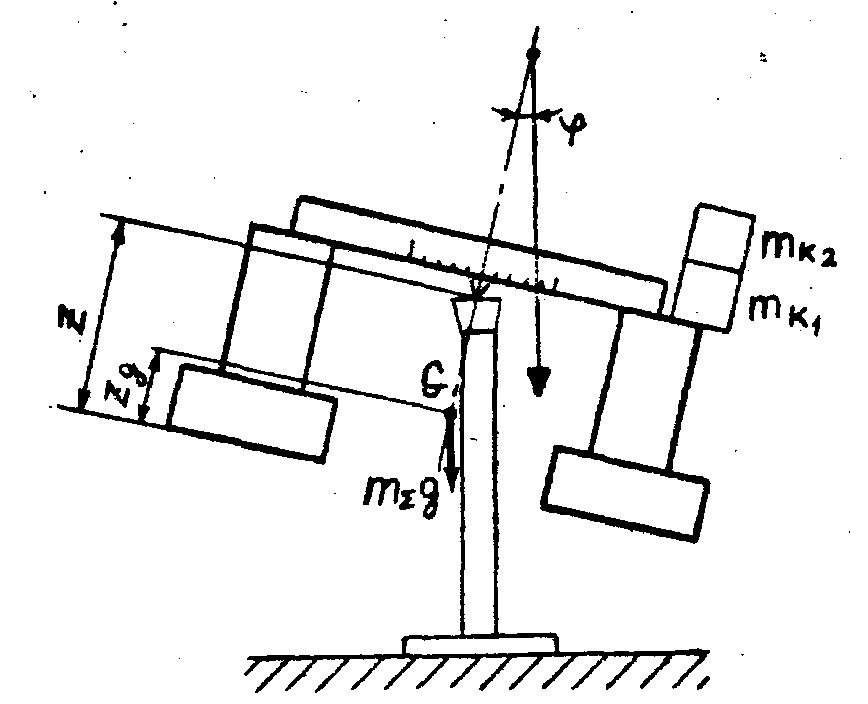
Рис.5. Определение положения центра тяжести модели методом наклонения
Опыт 1 (походное положение):
mмодели = M1 = 10,0 кг – масса модели;
mгр = 0.92 кг – масса переносимого груза.
|
№ переноса груза n |
отклонение отвеса bi, мм |
|
1 |
4 |
|
2 |
4 |
|
3 |
4 |
|
Определение zg (на воздухе) |
|
|
1 |
20 |
|
2 |
20 |
|
3 |
21 |
Определяем осредненный угол крена :
![]() ,
,
где: n = 3 – число замеров;
L0 = 500 мм – длина отвеса;
![]() рад
рад
Рассчитываем метацентрический коэффициент поперечной остойчивости:
![]() ,
Н·дм,
,
Н·дм,
где: ![]() –
масса кренящего груза, кг;
–
масса кренящего груза, кг;
Сi – плечо переноса, дм;
g – ускорение свободного падения.
![]() Н·дм
Н·дм
Определим экспериментальную величину поперечной метацентрической высоты в походном положении:
![]() ,
дм,
,
дм,
![]() дм,
дм,
Определим положение центра тяжести модели в походном (zg1) положении:
![]() ,
дм
,
дм
где: z = 2.65 дм – отстояние оси подвеса от ДП;
М – масса модели (М1, М2);
= bi/L0 – угол наклонения, рад;
= b1/L0
= 20 / 500 = 0,04 рад;
= b1/L0
= 20 / 500 = 0,04 рад;
![]() дм;
дм;
Находим аппликаты поперечного метацентра в походном положении (снимаем с гидростатических кривых): zМ1 = 14.0 дм;
Определим теоретическое значение метацентрической высоты в походном положении:
![]() дм.
дм.
Опыт 2 (рабочее положение):
mмодели= M2 = 29,7 кг – масса модели;
mгр = 0,096 кг – масса переносимого груза.
|
№ переноса груза n |
отклонение отвеса bi, мм |
|
1 |
21 |
|
2 |
21 |
|
3 |
21 |
|
Определение zg |
|
|
1 |
6 |
|
2 |
7 |
|
3 |
5 |
Осредненный угол крена равен:
![]() рад
рад
Метацентрический коэффициент поперечной остойчивости равен:
![]() Н·дм
Н·дм
Экспериментальная величина поперечной метацентрической высоты в рабочем положении равна:
![]() дм
дм
Определим положение центра тяжести модели в рабочем (zg2) положении:
= b2/L0 = 6 / 500 = 0,012 рад;
![]() дм.
дм.
Находим аппликаты поперечного метацентра в походном положении (снимаем с гидростатических кривых): zM2= 1,9 дм.
Определим теоретическое значение метацентрической высоты в рабочем положении:
![]() дм.
дм.
В ывод:
Специфическая форма корпуса ППБУ
значительно уменьшает начальную
метацентрическую высоту в рабочем
положении, что приводит к снижению
интенсивности волновых воздействий во
время шторма.
ывод:
Специфическая форма корпуса ППБУ
значительно уменьшает начальную
метацентрическую высоту в рабочем
положении, что приводит к снижению
интенсивности волновых воздействий во
время шторма.