

Решение:
1. Параметры и величины естественной м.Х.
Находим значения скорости идеального холостого хода ωое, электромагнитной постоянной с и электромагнитного номинального момента Mн.
1.1.
![]()
где
![]()
1.2.
![]() р/с
р/с
1.3.
![]() Нм
Нм
Потребуются величины:
1.4. Номинальный момент на валу двигателя
![]() Нм
Нм
1.5. Момент холостого хода
![]() Нм
Нм
1.6. Момент холостого хода в долях и процентах от номинального электромагнитного момента
![]()
![]() %
%
Момент холостого хода обусловлен сопротивлением трению в подшипниках и щётках, потерями на гистерезис и вихревые потоки и аэродинамическим сопротивлением вентиляции.
1.7.Коэффициент жесткости естественной М.Х.
![]() %
%
Естественная М.Х. нашего двигателя относится к категории “жестких”, так как %<10 (при других показателях М.Х. считают мягкими).
Строится
естественная характеристика по двум
точкам с координатами ![]() и
и ![]() .
.
Показана на рис. 4 и рис. 5, обозначена буквой е.
2.Расчет сопротивления пускового реостата:
2.1.Выбираем величину пускового токаI1по критерию
![]()
![]() А
А
2.2.Задаемся предварительно током переключения ступеней
![]()
![]() А
А
2.3.Определяем полное сопротивление пускового реостата Rn
![]() Ом
Ом
2.4.Устанавливается число ступеней пускаm.

где
![]()
Округляем полученное дробное число m= 2,289 до целогоm= 3.
2.5.Определяем точное значение коэффициента λ с уточнением величиныI2против принятогоI2пр.
По формуле получаем

2.6.Рассчитываем сопротивления ступеней пускового реостата, обозначенных в схеме на рис. 1.

Рис. 1.
![]() Ом
Ом
![]() Ом
Ом
![]() Ом
Ом
Проверка правильности расчетов.
![]() Ом
Ом
![]() Ом
Ом
3. Сопротивления для динамического торможения Rдт.
Максимальное его значение должно быть не менее величины пускового реостата Rn.
![]() Ом
Ом
4. Расчет сопротивления для режима противовключения.
Величина всего сопротивления режима ПК.
![]() Ом
Ом
Его составляющая, как добавка к Rn:
![]() Ом
Ом
Получено Rp>Rn, так какRp=Rn+Rя.
5. Напряжения якоря, допустимое для прямого пуска двигателя.
![]() В
В
Оно должно быть меньше номинального в
![]() раз.
раз.
6. Тормозной момент двигателя при скачкообразном уменьшении номинального напряжения на U/Uн = 0,7.
Данных в исходной информации недостаточно, чтобы решить задачу однозначно, так как не ясно, на какой М.Х. работал двигатель до уменьшения напряжения.
Будем считать, что он работал на естественнойМ.Х., для которой выполняются условияU=Uн,Ф*= 1,Rn= 0,Rш= ∞.
Эта характеристика является самой жесткой относительно других, искусственных М.Х. Чем жестче характеристика и чем меньше нагрузка, тем больше толчки момента двигателя при резких изменениях напряжения якоря.
Поскольку скорость не может изменяться мгновенно из-за инерционности системы, то после ступенчатого уменьшения напряжения якоря до U/Uн= 0,7, т.е 30%, можно приМс= 0 записать:
![]()
Получим
![]() Нм
Нм
Максимально допустимый момент двигателя по условиям коммутации равен
![]() Нм
Нм
Делаем вывод: резкое снижение питающего напряжения исследуемого двигателя на 30% при работе его вхолостую приведет к толчку тормозного момента, большему в 106,933/66,428 = 1,6 раза, чем допустимо.
Иллюстрация перехода на новую М.Х. с естественной характеристики при уменьшении скачком напряжения на 30% показана на рис. 2.
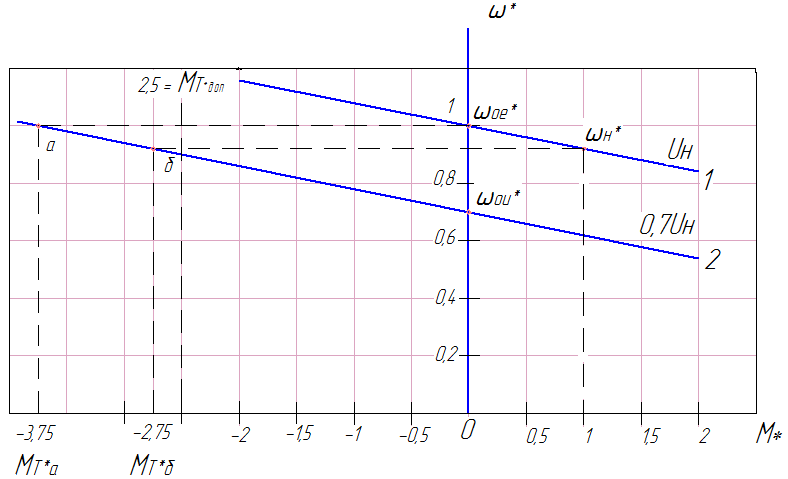
Рис. 2.
Характеристики
построены в относительных единицах
![]() .
.
![]()
![]()
![]()
Естественная
1 и искусственная 2 М.Х. проходят параллельно
со сдвигом относительно скоростей
идеального холостого хода на 0,3 единицы.
При переходе из точки холостого хода
![]() по горизонтали в точкуaна искусственной М.Х. получаем
по горизонтали в точкуaна искусственной М.Х. получаем![]() , что больше допустимого значения
, что больше допустимого значения![]() .
При работе с номинальной нагрузкой
переходим из точки
.
При работе с номинальной нагрузкой
переходим из точки![]() в точку б при
в точку б при![]() ,
что больше допустимого значения
,
что больше допустимого значения![]() .
.
Очевидно,
что показатели для начального значения
![]() при ступенчатом уменьшении напряжения
из-за параллельности начальной и
последующих М.Х. не будут зависеть от
того, начался ли процесс с естественной
характеристики, или с другой, параллельной
для неё.
при ступенчатом уменьшении напряжения
из-за параллельности начальной и
последующих М.Х. не будут зависеть от
того, начался ли процесс с естественной
характеристики, или с другой, параллельной
для неё.
Какое изменение напряжения не вызовет броска момента двигателя выше допустимого значения. Решая совместное уравнения М.Х. для первичного напряжения якоря U1и для пониженного скачком доU2, считая что скорость в момент изменения напряженияне меняется.
![]() ,
(1)
,
(1)![]() (2)
(2)
M1– момент двигателя до изменения напряжения,
М2 – момент двигателя при ступенчатом понижении напряжения отU1доU2, в расчетах нужно учитывать его знак «+» или «-».
Вычитая (2) из (1) при ω1=ω2, получим
![]()
![]()
Наибольшим значением ∆Uбудет приM1→ 0, то есть в режиме холостого хода. ВеличинаM2должна быть не болееλIMH. Поэтому формула (3) запишется в виде
![]()
Здесь M2имеет знак «-».
Для данных контрольной работы по (4) получим
![]() В.
В.
В процентах от номинального напряжения якоря это составит
![]()
Итак, для ДПТ НВ с номинальными данными в контрольной работе переход с М.Х. с большим напряжением на М.Х. с меньшим напряжением должен сопровождаться понижением напряжения якоря скачком не более чем на 20,5 В (19%).
7. Параметры искусственной М.Х.приФ<Фн.
Определяем кратность уменьшения номинального магнитного потока для увеличения номинальной скорости в ω*ф= 1,4 раз.
При неноминальном магнитном потоке уравнение скоростной характеристики имеет вид.
![]()
Для поставленного условия имеем:
I=Iн,ω= 1,4ωн,U=Uн.
Получаем:
![]()
На новой механической характеристике при Фя= 0,714 скорость идеального холостого хода ωоф получает значение
![]() р/с.
р/с.
Для тока Iнполучим
![]() р/с.
р/с.
Момент нагрузки на валу двигателя должен быть при I=Iнне более
![]() Нм.
Нм.
8.Параметры М.Х. двигателя, обеспечивающие уменьшение его номинальной скорости в 4 раза при номинальном токе якоря.
Уменьшить номинальную скорость ДПТ НВ можно тремя способами: уменьшением напряжением якоря, введением добавочного сопротивления Rnв цепь якоря, введением последовательного сопротивленияRnс одновременным шунтированием якоря резисторомRш. Каждому из указанных вариантов будут соответствовать выражения искусственных М.Х.
![]()
![]()
![]()
По выражением следует определить значения U,RnиKшпри соответствующихRnиRш, обеспечивающихω= 0,25ωнприM=Iн∙c.
8.1.Расчет напряжения якоря, обеспечивающего уменьшение номинальной скорости в 4 раза.
Записываем уравнение при ω= 0,25ωн,M=Mн=Iн∙c:
![]()
Получаем
![]()
Определяем величину требуемого пониженного напряжения:
![]() В
В
Это напряжение обеспечивает скорость идеального холостого хода:
![]() р/с
р/с
8.2.Величина последовательного сопротивления, обеспечивающая приM = Iн ∙ сзначениеω = 0,25ωн.
Получаем
![]()
Откуда определяется параметр Rn:
![]() Ом
Ом
Скорость холостого хода не зависит от Rn, поэтому
![]() р/с
р/с
8.3.ЗначенияRnиRш, обеспечивающиеω = 0,25ωнприM=Mн=Iн ∙ c.
Решить эту задачу однозначно, пользуясь формулой М.Х. (8), невозможно, так как две переменные, вязаные через
![]()
могут принимать различные соотношения, необходимое из которых не определяется по (8). Дополнительным условием для решения поставленной задачи послужит требование электромеханики обеспечивать для М.Х. нижнего уровня регулируемой скорости жесткость, дающую отклонения скорости не более чем на 20 % при изменении момента нагрузки в таком же пределе от номинального значения. Желаемая искусственная М.Х., обеспечивающая выше указанное требование и проходящая через заданные координаты ωiн,Mннижнего диапазона регулирования скорости 1:4, показана на рисунке 3. Для неё можно записать:
![]()
![]()
Совместное решение (11) и (10) даёт
![]()

Рис.3
После подстановки в (12) значений ωiн=ωн/ 4 = 78,54 р/с иωое= 339,465 р/с получим
![]()
Теперь, согласно выражению (8), для точки Kна М.Х. (рис.3), получим
![]()
Подставляем в (13) известные величины:
![]()
![]()
![]()
Величину Rшнаходим, используя формулу (9):
![]()
Скорость идеального холостого хода ωош, соответствующаяKш= 0,463 будет равна:
![]()
9.Расчёт изменений скоростидвигателя на М.Х. с параметрами, установленными в пункте 8, при увеличении момента нагрузки на 20% от номинального значения.
Для решения задачи необходимо по выражениям (6), (7), (8) найти значения скоростей ωн,ωn,ωшприМ = 1,2Мн и соответствующие отклонения их от ωiн= 78,54 р/с
Выполняем расчёты.
9.1.Для М.Х. при понижении напряжении
![]()
![]()
9.2.Для М.Х. с последовательным сопротивлениемRn= 0,931 Ом, найденным в пункте8.2.
![]()
![]()
9.3.Для М.Х. с добавочным сопротивлениемRn= 1,854 Ом,Rш= 1,597 Ом приKш= 0,463, определены в пункте8.3.
![]()
![]()
Результаты расчётов показывают, что из трёх способов параметрического регулирования скорости вниз от естественной М.Х. не может обеспечить заданный диапазон регулирования 1:4 реостатное регулирование без шунтирования якоря.
Этот способ не обеспечивает требуемой жёсткости М.Х., и при изменениях нагрузки на ±20% от номинального значения скорость двигателя будет изменяться на 66,406% вместо допустимых 20,012%. Наименьшие отклонения скорости наблюдается на М.Х. с пониженным напряжением 6,444%.