

2 Лабораторная работа / 2-Лабораторная работа (Физика)_15 / лр2 / лр2
.doc
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ.
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра физики
ОТЧЕТ
Лабораторная работа по курсу "Общая физика"
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТВЕРДЫХ ТЕЛ
Преподаватель Студент группы
___________ / /
___________2000 г.
Томск 2003
1. ЦЕЛЬ РАБОТЫ
Целью настоящей работы является определение момента инерции твердых тел и экспериментальная проверка справедливости теоремы Штейнера на примере физического маятника.
2. ОПИСАНИЕ УСТАНОВКИ И МЕТОДИКИ ЭКСПЕРИМЕНТА
Д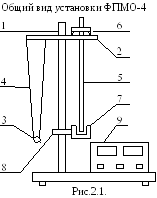 ля
экспериментальной проверки теоремы
Штейнера и определения момента инерции
в данной работе используется стандартная
установка универсального маятника
ФПМО - 4. Это настольный прибор
(рис. 4.1), на вертикальной стойке
основания 1 которого крепится
кронштейн 2, который имеет возможность
поворота вокруг стойки на 360
и фиксация в любом выбранном положении.
С одной стороны кронштейна 2 подвешен
математический маятник, а с другой -
физический. Математический маятник
представляет собой металлический
шарик 3 на бифилярном подвесе 4.
Физический маятник - стальной стержень 5,
подвешенный на опорной призме 6.
Опорная призма 6 может перемещаться
по всей длине стержня и фиксироваться
в требуемом положении.
ля
экспериментальной проверки теоремы
Штейнера и определения момента инерции
в данной работе используется стандартная
установка универсального маятника
ФПМО - 4. Это настольный прибор
(рис. 4.1), на вертикальной стойке
основания 1 которого крепится
кронштейн 2, который имеет возможность
поворота вокруг стойки на 360
и фиксация в любом выбранном положении.
С одной стороны кронштейна 2 подвешен
математический маятник, а с другой -
физический. Математический маятник
представляет собой металлический
шарик 3 на бифилярном подвесе 4.
Физический маятник - стальной стержень 5,
подвешенный на опорной призме 6.
Опорная призма 6 может перемещаться
по всей длине стержня и фиксироваться
в требуемом положении.
Стержень 5 имеет кольцевые проточки, которые служат для надежной фиксации опорных призм. Установка снабжена фотоэлектрическим датчиком 7, который закреплен на вертикальной стойке с помощью кронштейна 8 и имеет возможность перемещаться как вдоль, так и вокруг стойки и фиксироваться в любом положении. Датчик предназначен для выдачи сигналов на миллисекундомер 9. Миллисекундомер физический выполнен самостоятельным прибором с цифровой индикацией времени и количества полных периодов колебаний маятника.
3. ОСНОВНЫЕ РАСЧЕТНЫЕ ФОРМУЛЫ
Средняя величина периода колебаний маятника:
T = t / n , (3.1)
где t - продолжительность 10 15 колебаний;
n - число колебаний за время t.
Формула для экспериментального расчета момента инерции прямого тонкого стержня
![]() , (3.2)
, (3.2)
где T - период колебаний маятника;
l - расстояние от центра масс до точки подвеса маятника;
m - масса маятника;
g - ускорение свободного падения.
Формула для теоретического расчета момента инерции прямого тонкого стержня длиной d и массой m относительно оси, перпендикулярной к стержню и проходящей через его середину:
I0 = md2/12 (3.3)
Формулы наименьших квадратов.
![]() (10.2)
(10.2)
где обозначено:
 (10.3)
(10.3)
В этих формулах n – число экспериментальных точек, а наборы чисел (xi) и (yi) – результаты измерений, то есть абсциссы и ординаты экспериментальных точек.
Погрешности косвенного измерения параметров прямой линии k и b методом наименьших квадратов определяются по следующим формулам:
![]() (10.4)
(10.4)
где
 .
(10.5)
.
(10.5)
4. РЕЗУЛЬТАТЫ РАБОТЫ И ИХ АНАЛИЗ.
Результаты прямых и косвенных измерений представлены в таблице.
Таблица 4.1.
Данные измерений
|
Номер опыта |
n |
t, c |
T, c |
l2, м2 |
I, кгм2 |
Примечание |
|
1 |
14 |
17,827 |
1,273 |
0,0841 |
0,0418 |
m = 358 г (t) = 2 мс (m) = 2% |
|
2 |
14 |
17,316 |
1,237 |
0,0625 |
0,0340 |
|
|
3 |
14 |
16,948 |
1,211 |
0,0441 |
0,0274 |
|
|
4 |
14 |
16,897 |
1,207 |
0,0289 |
0,0220 |
|
|
5 |
14 |
17,333 |
1,238 |
0,0169 |
0,0177 |
|
|
6 |
14 |
18,826 |
1,345 |
0,0081 |
0,0145 |
|
|
7 |
14 |
23,445 |
1,675 |
0,0025 |
0,0125 |
Результаты измерений приведены в таблице 4.1. Там же представлены рассчитанные средняя величина периода колебания маятника и момент инерции.
Расчет момента инерции относительно оси, проходящей через центр масс
I0 = md2/12=0,358*0,622/12= 0,0115 кг*м2
Таблица 4.2
Таблица сравнения экспериментальной зависимости с теоретической
|
n |
I (кг*м2) |
I0 + ml2 (кг*м2) |
|
1 |
0,0418 |
0,0416 |
|
2 |
0,0340 |
0,0338 |
|
3 |
0,0274 |
0,0273 |
|
4 |
0,0220 |
0,0218 |
|
5 |
0,0117 |
0,0175 |
|
6 |
0,0145 |
0,0144 |
|
7 |
0,0125 |
0,0124 |


=0,00063
следовательно, доверительный интервал равен:
2![]() =0,00126
=0,00126
И так как прибор – цифровой, то п(t) равна 1 в младшем разряде прибора и равна 0,001.
![]() =0,005м
т.к. класс точности прибора не указан.
В этом случае абсолютная погрешность
=0,005м
т.к. класс точности прибора не указан.
В этом случае абсолютная погрешность
![]() (l)
не зависит от результата измерения l.
И так как прибор – не цифровой, а -
линейка, то
(l)
не зависит от результата измерения l.
И так как прибор – не цифровой, а -
линейка, то
![]() (l)
равна половине цены деления прибора.
(l)
равна половине цены деления прибора.
Учитывая погрешности и данные таблицы измерений на рис. 4.1 представлен линеаризованный график I =f(l2) Из него видно, что прямая пересекла доверительные интервалы для всех экспериментальных точек.
График 5.1
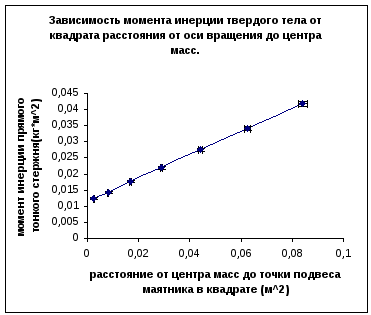
5.ВЫВОДЫ
Экспериментальная зависимость I=f(l2) является линейной, значит правильность соотношения I=I0+ml2 (кг*м2) подтверждена экспериментально. А линейность графика 5.1 свидетельствует о выполнимости закона Штейнера.
|
n |
I (кг*м2) |
|
1 |
0,0418 |
|
2 |
0,0340 |
|
3 |
0,0274 |
|
4 |
0,0220 |
|
5 |
0,0117 |
|
6 |
0,0145 |
|
7 |
0,0125 |
Ответы на контрольные вопросы:
1.Моментом инерции механической системы относительно неподвижной оси вращения называется физическая величина I, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до оси:
![]()
2. Свойствами маятника широко пользуются в различных приборах: часах, в приборах для определения ускорения силы тяжести, ускорений движущихся тел, колебаний земной коры, в гироскопических устройствах, в приборах для экспериментального определения момента инерции тел и др.
3. Момент инерции I относительно произвольной оси равен сумме момент инерции I0 относительно оси, параллельной данной и проходящей через центр масс тела и произведения массы тела m на квадрат расстояния l между осями:
I = I0 + ml2
4. Под действием силы тяжести совершается колебательное движение маятника.
5. Момент инерции является аддитивной величиной.
6. В данной лабораторной работе физический маятник представляет собой цилиндрический стальной стержень. Силу тяжести P = mg можно разложить на составляющие, одна из которых Р2 уравновешивается реакцией подвеса. Под действием другой Р1 маятник приходит в движение. На основании второго закона Ньютона для динамики вращательного движения запишем:
|
|
(0) |
где
М – момент вращающей силы;
![]() - угловое ускорение.
- угловое ускорение.
Модуль
составляющей силы Р1
= Рsin![]() .
При малых углах sin
.
При малых углах sin![]()
![]()
![]() .
.
|
|
(0) |
|
|
(0) |
Моментом силы трения в первом приближении можно пренебречь, так как маятник совершает несколько сот колебаний без заметного затухания. Подставляя выражения (2), (3) в (1), получим
|
|
(0) |
Решением этого дифференциального уравнения является
|
|
(0) |
где
![]() (t)
– угол отклонения маятника в данный
момент времени;
(t)
– угол отклонения маятника в данный
момент времени;
![]() –
максимальное
отклонение – амплитуда колебаний;
–
максимальное
отклонение – амплитуда колебаний;
![]() -
угловая частота;
-
угловая частота;
![]() -
начальная фаза в момент времени t
= 0.
-
начальная фаза в момент времени t
= 0.
Для малых углов отклонения
|
|
(0) |
Период колебаний маятника
|
|
(0) |
Из выражения (7) получим
|
|
(0) |
Тогда, зная ускорение свободного падения g, массу m, экспериментально измерив l и определив Т, можно вычислить момент инерции маятника.
7. Физическим маятником называется любое тело, которое под действием силы тяжести может свободно качаться вокруг неподвижной оси, не проходящей через центр масс.
8.
При малых углах отклонения
![]() маятник
также совершает колебания, близкие к
гармоническим.
маятник
также совершает колебания, близкие к
гармоническим.
9.
М
= I![]() = -RI,
= -RI,
где
М – момент вращающей силы;
![]() - угловое ускорение.
- угловое ускорение.