

Глава 17. Конструкции и характеристики регуляторов
-
РЕГУЛЯТОРЫ ПРЯМОГО ДЕЙСТВИЯ
Регулятором прямого действия называют регулятор, перемещение регулирующего органа которого производится воздействием чувствительного элемента, использующего для этого энергию регулируемой среды.
Примером регулятора прямого действия является показанный на рис. 121 астатический регулятор уровня. В этом регуляторе чувствительным элементом является поплавок, а регулирующим органом — заслонка.
Отсутствие дистанционного управления у регуляторов прямого действия ограничивает их область применения. Однако благодаря небольшой стоимости и простоте конструкции регуляторы прямого действия находят применение в тех случаях, когда требуется стабилизирующее регулирование с невысокой точностью при постоянной нагрузке.
Промышленность выпускает серийно регуляторы прямого действия для стабилизации температуры, давлений и уровня.
Регуляторы температуры типов РТД, РТ и РТК предназначаются для автоматического поддержания заданной температуры жидких и газообразных сред.
Рассмотрим работу регулятора прямого действия типа РТД (рис. 133). Термометрическая система регулятора представляет собой паровой манометрический термометр, состоящий из термобаллона 1, капилляра 2 и сильфона 3. Внутренняя емкость системы частично заполнена низкокипящей жидкостью, температура кипения которой ниже нижнего предела регулирования температуры. Термобаллон размещается в контролируемой среде, и
Рис. 133. Регулятор температуры пря- Рис. 134. Регулятор давления прямого мого действия действия
в соответствии с ее температурой в термометрической системе устанавливается давление паров рабочей жидкости. В результате этого в сильфоне развивается усилие, пропорциональное гое эффективной площади, которое уравновешивается усилием пружины 4. При отклонениях температуры от заданного значения, определяемого состоянием пружины, давление в термосистеме изменяется и, следовательно, растягивается или сжимается силь- фон, вызывая перемещение штока 5 и золотника 6 регулирующего клапана. Благодаря этому изменяются проходное сечение клапана и количество нагреваемого вещества. Изменение расхода нагреваемого вещества прекращается, как только его температура достигнет заданного значения.
Регуляторы давления выпускаются двух типов: пружинные и гиревые. К первым относятся регуляторы перепада давления. Такие регуляторы выпускаются двух модификаций: «после себя» (давление закрывает) и «до себя» (давление открывает).
Регулятор давления прямого действия РДП (рис. 134) предназначен для поддержания давления мазута в трубопроводе. Плоская гофрированная мембрана 2 жестко связана с золотником 4 клапана. Настройка регулятора на необходимое давление осуществляется винтом, соединенным с мембраной посредством тарированной пружины 3. При увеличении давления в системе 1 мембрана 2 прогибается вниз и прикрывает доступ мазута едпо- мощью золотника 4. Регуляторы РДП выпускают в четырех модификациях с давлениями настройки от 0,1 -10е Па до 4-10® Па. Регулятор встраивается непосредственно в трубопровод и настраивается по показанию манометра. Ф
 Из
регуляторов давления прямого действия,
предназначенных для автоматического
поддержания заданного давления пара,
воды, таза и других сред, следует отметить
регулятор типа РД-32. Диапазон настройки
регулятора 0,25-10® ... 2,5-10® Па, диаметр
условного прохдда 32 мм, зона
нечувствительности — не более 2,5 %.
Из
регуляторов давления прямого действия,
предназначенных для автоматического
поддержания заданного давления пара,
воды, таза и других сред, следует отметить
регулятор типа РД-32. Диапазон настройки
регулятора 0,25-10® ... 2,5-10® Па, диаметр
условного прохдда 32 мм, зона
нечувствительности — не более 2,5 %.
Универсальный регулятор давления типа РДУК-2 предназначен для регулирования высокого (1,2-10е МПа) и среднего (0,6 МПа) давления неагрессивного газа и поддержания заданного значения выходного давления от нуля до максимума при переменном входном давлении и изменении расхода.
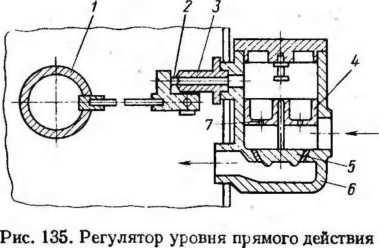
Регуляторы уровня поплавкового типа являются наиболее распространенными. Регулятор уровня РУ-16 (рис. 135) имеет поплавок 1, который кинематически связан с золотниковым устройством 5 клапана 6. Поступающая в клапан жидкость своим напором поднимает поршень 4 и связанное с ним золотниковое устройство 5 и течет в резервуар через щель между золотником и корпусом клапана. В это же время часть жидкости протекает через небольшое отверстие 7 поршня и головки 3 в резервуар. При достижении заданного уровня в резервуаре жидкость поднимает поплавок, который перекрывает пробкой 2 отверстие в головке <3.
Давление жидкости под поршнем уравнивается, а поршень действием собственного веса опускается вместе с золотником, перекрывающим отверстие, в клапан, после чего подача жидкости в резервуар прекращается. При снижении жидкости в резервуаре поплавок опускается и приоткрывает пробкой отверстие в головке 3, давая тем самым поступающей жидкости вновь поднять поршень и заполнить резервуар до заданного уровня.
Регулятор РУ-16 предназначается для регулирования уровня чистых агрессивных жидкостей с температурой 5 ... 60 °С.
-
ЭЛЕКТРИЧЕСКИЕ РЕГУЛЯТОРЫ КОСВЕННОГО
ДЕЙСТВИЯ
В электрических и электронных регуляторах для управления исполнительным механизмом используется электрическая энергия.
Для создания позиционных систем автоматического регулирования в литейных и термических цехах используют серийные приборы различных модификаций, снабженных электрическими контактными устройствами. Для позиционного регулирования могут быть использованы преобразователи релейного типа (биметаллические, дилатометрические и др.).
Рис.
136. Схема двухпозициоииого электрического
регулятора температуры
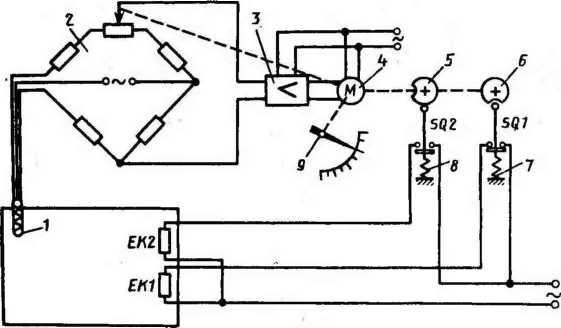
ниже допустимой, то должны включаться нагревательные элементы ЕК1 большой мощности, а если температура станет выше допустимой, то включаются элементы ЕК2 малой мощности. В качестве чувствительного элемента используется термометр сопротивления 1, подключенный к электронному мосту 2 по трехпроводной схеме. Если температура в печи отклонится от заданного значения, то изменится электрическое сопротивление термометра и в диагонали моста появится сигнал разбаланса. Усиленный электронным усилителем 3 сигнал приводит во вращение ротор реверсивного двигателя 4. Направление его вращения зависит от знака разбаланса, т. е. от знака отклонения температуры от заданного значения. С ротором электродвигателя кинематически связаны два диска: 5 к 6, положение которых зависит от угла поворота ротора, следовательно, от положения движка реохорда и показывающей стрелки 9 моста. К дискам с помощью пружин 7 и 8 прижаты направляющие контактов 8С}1 и БС12. При вращении дисков контакт БС}2 замкнут в интервале показаний прибора от начала шкалы до впадины диска 5 и разомкнут в интервале от впадины до максимума шкалы. Контакт 8С}1, наоборот, разомкнут от начала шкалы до впадины диска 6 и замкнут в интервале от впадины до максимума шкалы.
При достижении нижнего температурного предела замыкается контакт 8С}1 и включаются нагревательные элементы ЕК1 большой мощности. При достижении верхнего температурного пре дела замыкается контакт 802, а контакт 5(2/ размыкается, что приводит к медленному снижению температуры. Как только будет достигнут нижний предел температуры, ситуация повторится, и т. д.
На рис. 137 показана электрическая схема двухпозициоииого регулирования температуры в рабочем пространстве камерной печи типа СНЗ-4,0.8,0.2,6/10
НАї.г
58МР,
її
»г
73
|
U-F |
Hg 1=> |
|
9 SQ7 |
nM2 |
|
|
U ßA |
|
|
S~ |
«л». з
-О-1
Рис. 137. Электрическая схема регулирования температуры рабочего пространства камерной электрической печи с защитной атмосферой
И приводу исполнительного механизма
Ы L-J
Рис.
138. Упрощенная структурная схема
балансного реле типа БР-3

с защитной атмосферой. Печь трехфазная и подсоединяется к печи через предохранители FU. Включение и выключение нагревательных элементов ос.уще- ствляется с помощью контактора. Стабилизация температуры обеспечивается системой автоматического регулирования (САР).
Схема управления состоит из 13 цепей. По функциональному признаку их можно разделить на цепи управления, цепи защиты и информационные цепи. Управление осуществляется: температурой в рабочем пространстве печи (автоматическое и ручное в случае выхода САР из строя); подачей защитной атмосферы в печь; подачей газовой завесы. Информационные цепи служат для оповещения обслуживающего персонала о различных режимах работы печи с помощью световых и звуковых сигналов.
В печи имеется одна зона. Регулирование температуры осуществляется с помощью САР, состоящей из термопары, компенсационных проводов, потенциометра ПСР (потенциометр самопишущий, регулирующий), промежуточных реле КА1 и КА2, контактора КМ и, наконец, самой печи СНЗ-4,0.8,2.6/10. Потенциометр ПСР связан со схемой управления с помощью цепей 1, 2 к 3. Цепь 1 служит для питания самого прибора ПСР. Цепи 2 и 3 содержат минимальный (min) и нормальный (norm) контакты терморегулятора ПСР. Максимальный контакт (max) ПСР в схеме не использован. В цепях 2 и 3 формируется управляющий сигнал, который с помощью промежуточных реле КА! и КА2 усиливается до значения, необходимого для приведения в действие катушки исполнительного элемента (контактор КМ). Таким образом, KAI и КА2 играют роль усилителей сигнала по мощности.
В цепях 3 к 4 имеются контакты универсального переключателя, рассчитанного на три положения: автоматическое (А), выключено (0) и ручное (Р). Каждое из этих положений соответствует определенному режиму работы печи: автоматическое управление температурой в печи; печь выключена; ручное управление температурой (только при наладке режимов или в случае выхода САР из строя). С помрщью цепи 4 включается контактор и, следовательно, сами нагревательные элементы печи. Контактор может включиться только в том случае, если дверца печи будет закрыта. Последнее обеспечивается введением в цепь 4 путевого выключателя SQ1, выключающегося при открытии дверцы печи. Непосредственное включение катушки контактора, а следовательно, и его контактов осуществляется следующим образом: при автоматическом управлении — контактами промежуточных реле К.А1 и К.А2-, при ручном управлении — только с помощью контактов КА2.1.
Катушка КА1 включается только тогда, когда температура в печи достигает минимального значения. Катушка К.А2 подсоединена к контакту, соответствующему нормальной температуре в печи. Следовательно, нагревательные элементы печи остаются включенными и в том случае, когда температура печи станет равной заданной. Нагреватели отключаются от сети только тогда, когда температура в печи станет больше нормы. Так составлены цепи, управляющие стабилизацией температуры в печи. О том, включена печь или выключена в данный момент, нас информируют две сигнальные лампы: L1 и L2. При включенных нагревательных элементах горит сигнальная лампа L1, а при выключенных — лампа L2. Это достигается включением в цепи 5 и б контактов контактора КМ. Резисторы R в цепях 5 и 6 необходимы для понижения напряжения на сигнальных лампах с 220 В до рабочего (резисторы в цепях ламп играют роль нагрузочных сопротивлений). Цепи 7, 8 и 11 предназначены для управления подачей защитной атмосферы и газовой завесы.
В схеме имеются электромагнитные краны М1 и М2 соответственно подачи защитной атмосферы и подачи газа для создаиня газовой завесы в печи.
Как видно из структуры цепи 7, подать в печь защитную атмосферу можно только в том случае, если температура в печи ие снизилась до минимальной (при включении КА1 цепь 7 размыкается контактом КА1.2). Эта система является системой защиты от взрыва. Управление подачей газа в печь осуществляется вручную с помощью кнопок SB1 и SB2. Реле К A3 введено для размножения контактов, так как Ml не имеет блокировочных контактов.
При включении Ml (а также К A3) одновременно загорается сигнальная лампа L3, оповещающая обслуживающий персонал о том, что газовый кран открыт. Выключение газа (с помощью кнопки SB1) сопровождается выключением и L3\ при этом загорается другая сигнальная лампа — L4, которая информирует о том, что кран закрыт.
Цепи 12 и 13 информационные. С помощью пакетного переключателя Si42 можно включить сирену В А, оповещающую обслуживающий персонал о снижении температуры в печи до минимального значения, что является признаком какой-то неполадки (нагреватели должны были включиться еще при нормальной температуре). Таким образом, минимальный контакт min ПСР используется в этой схеме не только как датчик для стабилизации температуры в рабочем пространстве печи, ио и как датчик в системе автоматического оповещения и защиты. Система автоматического оповещения может быть выключена переводом переключателя во второе положение (цепь 13). Лампа L5 сигнализирует о том, что система автоматического оповещения отключена.
В трехпозиционном регуляторе регулирующий орган имеет третье положение, в котором при значении регулируемой величины, равном заданному, в объект подается такое количество энергии и вещества, которое требуется для нормальной его работы. Схема трех позиционного регулирования может быть подучена путем некоторого преобразования рассмотренной схемы двухпозиционного регулирования (см. рис. 136), если с помощью контактов SQ1 и SQ2 управлять тремя промежуточными реле. При замыкании контакта SQ1 включается реле К1, при замыкании SQ2 срабатывает реле К2. Если оба контакта SQ1 и SQ2 разомкнуты, то срабатывает реле КЗ. С помощью этих трех реле нагревательные элементы можно включить треугольником, звездой или выключать их, т. е. осуществлять трехпозидионное регулирование температуры.
' Для создания систем автоматического регулирования, реализующих пропорциональный закон регулирования, часто используют балансное реле типа БР-3. В этом реле применяются два реохорда. Значение регулируемой величины определяет положение движка одного реохорда (датчик), а степень открытия регулирующего органа — положение движка реохорда исполнительного механизма (обратная связь).
Задача балансного реле — оказание такого воздействия на исполнительный механизм, при котором положения движков двух реохордов были бы симметричными.
В схеме балансного реле БР-3 (рис. 138) главными элементами являются поляризованное реле РП-5 и выходные реле ВР1 и ВР2. Пока положения движков симметричны, силы тока, протекающего в двух обмотках поляризованного реле, равны и, следовательно, контакты его разомкнуты. Выходные реле ВР1 и ВР2 обесточены, и их исполнительные контакты разомкнуты. При отклонении регулируемой величины (например, при увеличении) изменяется положение движка реохорда датчика. В результате симметричность моста и равновесие сил тока, протекающего через обмотки поляризованного реле нарушаются, и соответствующий контакт замыкается. При этом срабатывает выходное реле, контакты которого включают исполнительный механизм, перемещающий регулирующий орган в сторону уменьшения регулируемой величины. Одновременно перемещается движок реохорда обратной связи. Исполнительный механизм работает до тех пор, пока движок реохорда обратной связи не займет положение движка реохорда датчика, после чего опять наступает равновесие. Контакты реле размыкаются, а исполнительный механизм останавливается. Так обеспечивается постоянная связь между значением регулируемой величины и положением регулирующего органа.
Для создания систем автоматического регулирования, реализующие И-, ПИ- и другие законы, применяют различные электронные регуляторы, к числу которых относятся регуляторы типов ИРМ-240, ВРТ-2, ЭПП-17 и т. д.
Электронные регуляторы типа ИРМ-240 предназначены для пропорционально-интегрального регулирования с любыми измерительными приборами, оснащенными реостатными задатчиками с зоной пропорциональности 10 или 20 %. Они работают совместно с исполнительными механизмами с постоянной частотой вращения.
В качестве примера рассмотрим схемы регулирования (рис. 139) температуры в рабочем пространстве топливной печи. Эта схема работает следующим образом. Помещенный в рабочем пространстве печи термоэлектрический термометр 6 вырабатывает сигнал, пропорциональный температуре. Этот сигнал поступает на вход автоматического потенциометра 5, откуда он передается на изо- дромный регулятор 3. Одновременно на ход регулятора подается сигнал от задатчика 4. От изодромного регулятора сигнал поступает в усилитель 18, где он
15
Рис. 139. Схема регулирования температуры и соотношения газа и воздуха топливной печи
усиливается по мощности и напряжению до значения, необходимого для изменения положения заслонки 7, расположенной на газопроводе. Регулятор непрерывно изменяет подачу топлива таким образом, чтобы температура в печи оставалась постоянной. Универсальный переключатель 1 имеет два положения: автоматическое и ручное. При ручном управлении используются кнопки 2.
Так как при регулировании температуры изменяется расход газа, то для экономического сжигания топлива приходится изменять и расход воздуха, т. е. поддерживвть заданное соотношение расхода газа и воздуха.
Вследствие изменения положения заслонки 7 в газопроводе изменяется перепад давления газа на диафрагме 9, что фиксируется чувствительными элементами дифманометра 10. В днфманометре перепад давления преобразуется в электрический сигнал, который подается в усилитель 12 и на измерительный прибор И, оснащенный интегрирующей (суммирующей) приставкой для подсчета израсходоаанного количества газа. С выхода усилителя сигнал поступает на вход регулятора 13 соотношения газа и воздуха, который через усилитель 17 управляет положением заслонки 20, установленной на воздухопроводе. Прн изменении расхода воздуха изменяется также перепад давления на диафрагме 8, что фиксируется дифманометром 19. Выходной сигнал дифманометра усиливается усилителем 16 и подается на вход регулятора соотношения газа и воздуха.
Для переключения режимов управления (автоматический или ручной) служит универсальный переключатель 15. При ручном режиме управление осуществляют с помощью кнопок 14.
Изодромные электрические регуляторы используются также в термических цехах в автоматических системах стабилизации атмосферы электрических печей.
Рассмотрим упрощенную структурную схему автоматического регулирования. углеродного потенциала (цементизации) по точке росы (рис. 140, а). Точка росы — это температура, до которой необходимо охладить влажный газ, чтобы пары воды начали конденсироваться, т. е. точка росы является мерой влажности газа.
В схеме используется первичный преобразователь для косвенного регулирования углеродного потенциала, описание которого приведено в гл. 10. Стабилизация состава атмосферы печи осуществляется изменением расхода корректи рующего газа.
Газ от генератора поступает к печи по трубопроводу 7. На его пути часть газа отбирается и с помощью насоса 6 через фильтр 5 и регулятор расхода 4 подается в специальную камеру 3, где расположен первичный преобразователь 1. Камера снабжена фреоновым холодильником 2 и трубкой для отвода отработанной пробы в свечу. Преобразователь 1 соединен с электрическим изодромным
К
печи / От генератора
Рис.
140. Структурные схемы регулировки
атмосферы печи: а
— при цементации; б
— при азотировании
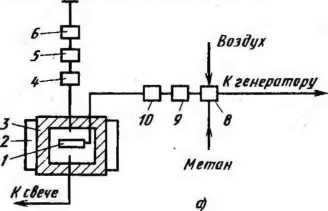
 регулятором
10.
При отклонении точки росы от заданного
значения он подает команду на электрический
исполнительный механизм 9,
который с помощью регулирующего органа
8
изменяет соотношение газ—воздух,
поступающий к генератору.
регулятором
10.
При отклонении точки росы от заданного
значения он подает команду на электрический
исполнительный механизм 9,
который с помощью регулирующего органа
8
изменяет соотношение газ—воздух,
поступающий к генератору.
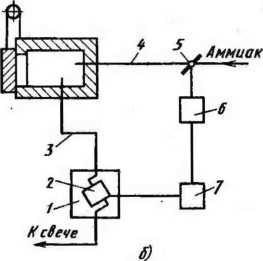
При газовом азотировании (рис. 140, б) аммиак по трубе 4 поступает в герметически закрытый муфель печи. Печь снабжена отводной трубкой 3,по которой атмосфера печи непрерыпно подается в специальную камеру 1, где расположен термокондуктометрический газоанализатор 2, настроенный на определенные содержания водорода в газовой смеси. Описание этого прибора приведено в гл. 10. Газоанализатор 2 соединен с электрическим изодромным регулятором 7, который при отклонении содержания водорода от заданного значения подает команду на электрический исполнительный механизм 6 не помощью регулирующего органа 5 изменяет расход аммиака.
В настоящее время широко используется система автоматического регулирования «Каскад». Эта система предназначена для применения в системах автоматического регулирования различных технологических процессов. Система составляет центральную часть электрической аналоговой ветви Государственной системы приборов (ГСП) и рассчитана на работу с отечественными измерительными приборами с дифференцированным выходным сигналом постоянного тока 0 ... 5 мА и 0 ... 20 мА и электрическими однооборотными исполнительными механизмами. Особенностями системы является блочно-модульное исполнение, использование современных высоконадежных элементов, малые габаритные размеры и расширенные функциональные возможности.
Для высокоточного регулирования температуры серийно выпускается регулятор ВРТ-2 с диапазоном регулирования ±0,5 "С. В качестве измерительных элементов в этом регуляторе используются термоэлектрические термометры типов ПР и ПП. Регулятор состоит из измерительного блока и регулирующего прибора типа Р-111.
Программные и следящие регуляторы создаются путем сочленения стабилизирующего регулятора с программным или следящим задающим устройством.
Наиболее распространенная конструкция программных регуляторов приборного типа (например, ЭПП-17) предусматривает кинематическую связь положения задатчика с радиусом кулачка, вращаемого синхронным двигателем привода диаграммы.
Характерным представителем современных электронных программных регуляторов аппаратного типа является регулирующее устройство типа РУ5, у которого носителем программы является диаграммная лента с нанесенной на ней кривой.
Программные устройства РУБ выпускаются в двух модификациях: для позиционного регулирования (РУ5-01М) и для П- и ПИ-регулирования (РУК-02М), предназначенные для работы в комплекте с регуляторами, например, РУ4-06, РУ4-15, РУ4-16А.
Программные регуляторы РУ5-01М и РУ4-02М комплектуются электронными измерительными приборами, имеющими дополнительный реостатный датчик со 100 %-ной зоной пропорциональности.
Погрешность программных устройств РУ5-01М и РУ5-02М не более 0,5 % от длины шкалы; порог чувствительности следящей системы составляет 0,2 % от длины шкалы.
-
ГИДРАВЛИЧЕСКИЕ РЕГУЛЯТОРЫ КОСВЕННОГО'
ДЕЙСТВИЯ
При автоматизации технологических процессов, связанных с применением регулирующих органов, требующих для приведения их в движение больших усилий, особенно при поступательном движении, целесообразно использовать гидравлические исполнительные механизмы. В этой связи созданы различные ком бинированные электронно-гидравлические регуляторы, в которых точность и компактность электрических измерительных и командных устройств сочетается с преимуществами гидравлических исполнительных элементов.
Электронно-гидравлическая система автоматического регулирования «Кристалл», получившая довольно большое распространение, представляет собой комплекс приборов и устройств, с помощью которых могут быть осуществлены регуляторы различной структуры, эта система предназначена для автоматизации теплотехнических процессов энергетического оборудования средней и малой мощности.
Рассмотрим принцип работы электронно-гидравлического регулятора (рис. 141). Первичные преобразователи / (не более трех) измеряют регулируемую величину и преобразуют ее в сигналы переменного тока. В транзисторном усилителе 2 эти сигналы суммируются между собой и с сигналом задатчика 3, усиливаются и подаются на обмотки электрогидравлического реле 5, управляющего гидравлическим исполнительным механизмом 6. Устройство обратной связи 7 преобразует перемещение вала исполнительного механизма в электрический сигнал, который подается
Рис.
141. Структурная схема электронйо-гидравли-
ческого регулятора системы «Кристалл»
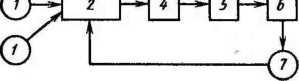
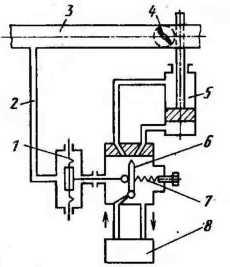 Рис.
142. Схема гидравлического струйного
регулятора
Рис.
142. Схема гидравлического струйного
регулятора
на вход усилителя. Дистанционное управление осуществляется с помощью блока 4 с пульта 8.
В комплекте с электронно-гидравлическим регулятором применяются первичные преобразователи: дифференциальные тяго- меты, электрические манометры, термометры сопротивления и термоэлектрические термометры. В системе регулирования «Кристалл» могут быть реализованы И-, П- и ПИ-законы регулирования. Эти регуляторы позволяют регулировать температуру, давление, расход или уровень, тягу или напор, соотношение «топливо (газ)—воздух» и другие параметры.
Наряду с рассмотренными электрогидравлическими регуляторами находят применение также и гидравлические струйные регуляторы. Их используют для регулирования давления, расхода и уровня.
Ниже в качестве примера рассмотрено устройство гидравлического струйного регулятора давления (рис. 142). Мембранный измерительный элемент 1 соединяется с объектом регулирования (воздухо- или газопроводом) 3 с помощью трубки 2. Входной величиной измерительного элемента является давление, а выходной — перемещение потока. В качестве усилительного преобразующего элемента используется струйная трубка 6, вспомогательная энергия к которой подводится от маслонапорной установки 8. Струйная трубка преобразует поступательное движение штока в кинетическую энергию движущейся масляной струи. Энергия струи в несколько раз больше, чем энергия перемещающегося штока. Исполнительное устройство состоит из исполнительного механизма (гидроцилиндра) 5 и регулирующего органа (поворотной заслонки) 4.
Регулятор работает следующим образом. При снижении давления газа в трубе 3 мембрана измерительного элемента 1 перемещается влево. Под действием пружинь! настройки 7 струйная трубка 6 переместится влево и заставит перемещаться шток исполнительного механизма 5 вверх, что приведет к открыванию заслонки 4. Приток газа или воздуха увеличится, а давление повысится.
Промышленность выпускает унифицированные узлы для агрегатного комплектования гидравлических струйных регуляторов типа РАГС (регулятор автоматический гидравлический струйный) и регуляторов типа КИП для воздуходувных установок.
Чувствительные элементы таких регуляторов предназначены для восприятия давления, разрежения или перепада давления контролируемой среды и преобразования их в усилия, передаваемые системой рычагов на струйную трубку гидравлического усилителя.
Струйные регуляторы РАГС используют для автоматического поддержания постоянного давления (разрежения) газа или жидкости в диапазоне 0 ... 10 МПа, а также постоянного расхода жидкости или газа и постоянного соотношения давлений или расхода двух жидкостей или газов.
Регуляторы давления КИП для воздуходувных установок применяются в общей схеме регулирования для защиты их от помпажа и создания постоянства давления в нагнетательном трубопроводе. Верхний предел регулирования 4,5 МПа. Зона нечувствительности 60 ... 1500 Па.
-
ПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ КОСВЕННОГО
ДЕЙСТВИЯ
В пневматических регуляторах взаимодействие между отдельными элементами и воздействие на регулирующий орган осуществляются с помощью сжатого воздуха.
Основным элементом пневматических регуляторов является устройство типа сопло—заслонка, в котором механическое перемещение чувствительного элемента преобразуется в сигнал сжатого воздуха.
В качестве примера рассмотрим работу пневматического регулятора давления РД, предназначенного для поддержания заданного давления неагрессивных паров или газов.
Регулируемое давление (рис. 143) подводится к манометрической пружине 4. К свободному концу пружины присоединена заслонка 6, которая опирается на подвижный упор 3 и под действием пружины 2 стремится прикрыть сопло 7. К последнему по линии питания через постоянный дроссель 1 подводится сжатый воздух. Проходное сечение дросселя 1 меньше проходного сечения сопла 7, поэтому перемещение заслонки относительно сопла при изменениях регулируемого давления вызывает изменение выходного давления в командной линии регулятора. Таким образом, систему сопло—заслонка можно рассматривать как дроссель переменного сечения. Следовательно, изменяя положение заслонки, можно регулировать давление сжатого воздуха, поступающего на исполнительный механизм.
Питание
Регулируемое
давление
Выходное
давление
Рис.
143. Схема регулятора давления типа
РД
Рис.
144. Исполнительные дросселирующие
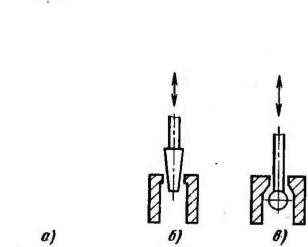
устройства типа сопло—заслонка: а
— золотник; б — игла; е — шарик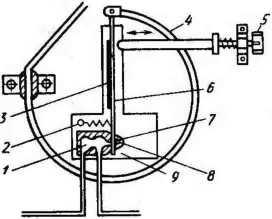
 Изменение
регулируемого давления приводит к
перемещению свободного конца
манометрической пружины и соответственно
заслонки относительно сопла, вследствие
чего меняется выходное давление
регулятора. На исполнительный механизм
оказывается регулирующее воздействие,
и регулируемое давление приводится к
заданному значению. Регулятор настраивается
на заданное значение регулируемой
величины задатчиком 5,
с помощью которого можно поворачивать
плату 9
с заслонкой 6
вокруг оси 8.
Настройка степени
неравномерности в диапазоне 5 ... 50 %
осуществляется передвижением упора
8.
Изменение
регулируемого давления приводит к
перемещению свободного конца
манометрической пружины и соответственно
заслонки относительно сопла, вследствие
чего меняется выходное давление
регулятора. На исполнительный механизм
оказывается регулирующее воздействие,
и регулируемое давление приводится к
заданному значению. Регулятор настраивается
на заданное значение регулируемой
величины задатчиком 5,
с помощью которого можно поворачивать
плату 9
с заслонкой 6
вокруг оси 8.
Настройка степени
неравномерности в диапазоне 5 ... 50 %
осуществляется передвижением упора
8.
Регулятор РД может быть настроен на прямое и обратное действие. В первом случае при повышении регулируемого давления давление командного сигнала (сжатого воздуха) возрастает от 0 до 100 кПа; при установке на обратное действие увеличение регулируемого давления вызывает понижение командного давления от 100 кПа до 0.
Пределы регулирования давления регуляторов РД в зависимости от типа изменяются от 100 кПа до 2,4 МПа. Давление сжатого воздуха, подводимого к регулятору, должно быть в пределах 127 ... 147 кПа.
В пневматических регуляторах, помимо описанного, применяются и другие исполнения устройств типа сопло—заслонка: дросселирующий золотник (рис. 144, а), дросселирующая игла (рис. 144, б) и дросселирующий шарик (рис. 144, е).
Учитывая большое сходство в конструкциях различных пневматических регуляторов, ограничимся рассмотрением только регулятора типа 04. Этот регулятор может встраиваться в компенсационные измерительные приборы, образуя системы регулирования температуры, давления, расхода и других параметров. По характеру регулирующего воздействия регулятор 04 является пропорционально-интегральным и осуществляет регулирование с изодромной обратной связью.
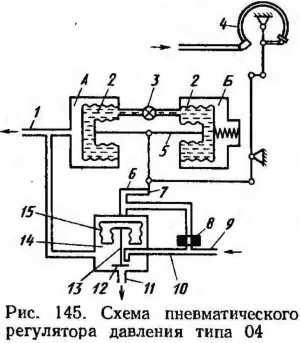 Регулируемое
давление подводится к манометрической
пружине 4
(рис. 145), которая раскручивается или
скручивается при его изменении. Деформация
пружины с помощью системы рычагов
вызывает перемещение заслонки 7
относительно сопла 6,
К соплу
через дроссель 8
непрерывно подается сжатый воздух
по трубке 9.
Так как проходное сечение трубки в
несколько раз больше сечения дросселя,
то перемещение заслонки вызывает
изменение давления воздуха, поступающего
в камеру пневматического реле 14.
Мембранная коробка 15
этого реле через шток 13
перемещает
золотник 12,
дросселирующий поток воздуха через
сопла 11
и 10.
Регулируемое
давление подводится к манометрической
пружине 4
(рис. 145), которая раскручивается или
скручивается при его изменении. Деформация
пружины с помощью системы рычагов
вызывает перемещение заслонки 7
относительно сопла 6,
К соплу
через дроссель 8
непрерывно подается сжатый воздух
по трубке 9.
Так как проходное сечение трубки в
несколько раз больше сечения дросселя,
то перемещение заслонки вызывает
изменение давления воздуха, поступающего
в камеру пневматического реле 14.
Мембранная коробка 15
этого реле через шток 13
перемещает
золотник 12,
дросселирующий поток воздуха через
сопла 11
и 10.
Если сопло 6 полностью открыто, то давление под мембраной равно атмосферному и золотник 12 прикрывает собой сопло 10. Одновременно через выпускное сопло 11 золотник соединяет с атмосферой идущую к исполнительному механизму командную линию, отчего давление под мембраной исполнительного механизма снижается до атмосферного и клапан занимает крайнее положение, например закрывается. Если сопло 6 полностью перекрыто заслонкой, то золотник закрывает сопло И и открывает сопло 10, через которое воздух подается в командную линию 1. Давление над мембраной клапана повышается, и он занимает второе крайнее положение. При промежуточных положениях заслонки клапан занимает промежуточное положение.
Устройство обратной связи состоит из двух пар сильфонов 2, помещенных в камеры А и Б. Пространство между внутренними и наружными сильфонами заполнено толуолом. Внутренние силь- фоны соединены штоком 5, а жидкостные полости сообщаются по трубке с игольчатым вентилем 3.
При пропорционально-интегральном регулировании игольчатый вентиль 3 открыт, т. е. сообщаются жидкостные полости сильфонов. Скорость перетекания жидкости из полости в полость зависит от степени открытия вентиля и от разности давления в камерах А и Б. Когда рассогласования нет и значение регулируемой величины равно заданному, давления жидкости в полостях А и Б равны.
Если давление в командной линии начнет увеличиваться, то механизм обратной связи отодвинет заслонку 7 от сопла 6. Поскольку давление в полости А больше давления в полости Б, то жидкость начнет перетекать через игольчатый вентиль 3 из полости А в полость Б, шток будет перемещаться влево и постепенно давление в обеих полостях выравняется. Но при этом заслонка опять приблизится к соплу, и командное давление увеличится, в результате чего регулирующий орган переместится и займет новое положение, обеспечивающее нормальное течени процесса при изменившихся условиях. Это значит, что исполни тельный механизм при значении регулируемой величины, равно> заданному, займет новое положение, при котором регулирующе воздействие компенсирует внешнее возмущение.
Такая обратная связь, при которой устраняется статическа] неравномерность, называется изодромной.
Регулятор типа 04 дает на выходе пневматический сигна. давлением 0 ... 100 кПа. Для питания регулятора используете) подаваемый через фильтр очищенный сжатый воздух давле нием 140 кПа.
-
ТЕХНИКА БЕЗОПАСНОСТИ ПРИ ЭКСПЛУАТАЦИИ РЕГУЛЯТОРОВ
Основными автоматическими регуляторами, применяв мыми в литейных и термических цехах, являются электрически регуляторы, поэтому общим требованием безопасности их экс плуатации является отключение питающих электрических цепей а также обеспечение каждого электрического регулятора средство! самостоятельной защиты при коротком замыкании или замыкани] на корпус.
Пневматические и гидравлические регуляторы давлени) должны быть оборудованы взрывными (предохранительными клапанами. Эти клапаны должны безотказно открываться пр! заданном давлении, обладать необходимой пропускной спосоС ностью и минимальным временем срабатывания и автоматичесю закрываться после окончания процесса сброса. Давление срабаты вания взрывного клапана не должно превышать рабочее давлени в 1,5 раза.
Все регуляторы должны также обеспечивать при отключени энергии, потребляемой исполнительными механизмами, или пр отказах автоматики перестроение регулирующих органов в поде жение, обеспечивающее безопасность работы объекта регулировг ния. Регулирующий орган в зависимости от конструктивног исполнения и вида регулируемого процесса в случае авари должен полностью открываться и фиксироваться в том же поле жении.
При эксплуатации автоматических регуляторов должны вь полняться общие требования ГОСТ 12.1004—76, регулирующей1 условия взрывобезопасности и пожарной безопасности.
Контрольные вопросы а задания
-
Как устроен и работает регулятор типа РТД?
-
Как устроен и работает регулятор типа РП?
-
Какие регуляторы называются двухпозициоиными?
-
Расскажите о различиях трехпозиционных и двухпозиционных регуляторах.
-
Как устроен и работает электрический регулятор иа базе поляризованного реле БР-3?
-
Каким образом осуществляется регулирование технологического процесса при помощи регулятора ИРМ-240?
-
Расскажите о назначении электронных регуляторов.
-
Опишите принцип работы и устройство программного регулятора РУБ.
-
Опишите принцип работы гидравлических струйных' регуляторов.
-
Как устроен и работает пневматический регулятор РД?
-
Как устроен и работает пневматический регулятор типа 04?