

ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ

Задачи динамического анализа
В динамике изучается движение механизмов с учетом действующих сил.
Сложный многозвенный механизм заменяют простой динамической моделью, в качестве которой принимают условное звено.
• Закон движения условного звена должен полностью совпадать с законом движения начального звена.
•Угловые скорости начального и условного звеньев должны быть равны.
• Все силы и моменты, действующие на звенья механизма должны быть приведены к одному звену, называемому приведенным.
•Массы звеньев приводят к этому звену и заменяют суммарным приве- денным моментом инерции, эквивалентным всей инерции механизма.
Можно иметь 2 вида одномассовых динамических моделей:
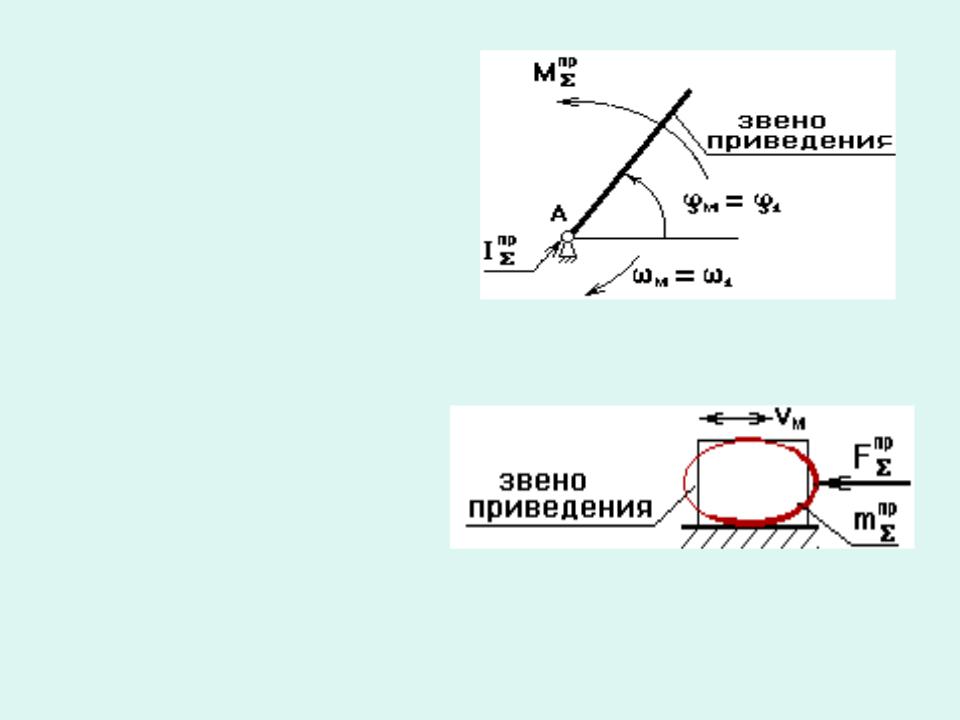
Звено приведения совершает вращательное движение,
Уравнение движения можно записать в виде
изменения кинетической энергии:
|
|
|
|
|
|
|
|
|
Т Тнач АПР |
||
|
|
|
|
||
|
I ПР м2 |
|
М КОН |
||
|
|
Т нач М ПР d м |
|||
2 |
|||||
|
М НАЧ |
||||
|
|
|
|||
Звено приведения совершает поступательное движение
Уравнение движения |
|
|
|
в виде изменения |
|
mПР V 2 |
s2 |
|
|
м |
|
кинетической энергии: |
2 |
Тнач FПР d sм |
|
|
s1 |
||
|
|
|
|
Определение параметров динамической модели
Приведение сил и моментов сил.
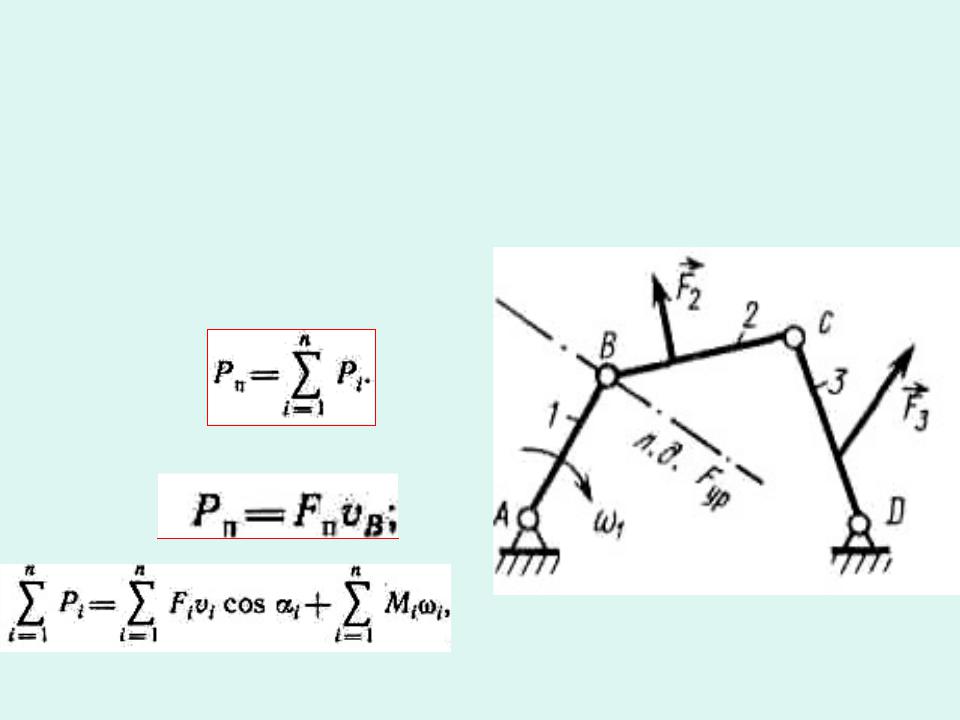
Силы и моменты сил можно привести к одному звену, которое
называется звеном приведения. При этом должно
соблюдаться равенство мощностей или элементарных работ,
Сформулированное условие для мощности в общем виде имеет вид :
При приведении к силе имеем 
VB - cкорость; Fi - cила; α - угол; Мi – момент силы; ωi – угловая
скорость.

Откуда приведенная сила равна
|
V |
Cos α1 + |
Mi |
i |
|||||||
FП = Fi Vi |
|
|
|
|
|
||||||
VB |
|||||||||||
Аналогично определяем приведенный момент |
|||||||||||
сил |
|
|
|
|
|
|
|
|
|
|
|
PП = МП ω1 |
|
|
РП |
|
|||||||
|
|
|
|||||||||
|
|
|
|
МП = |
|||||||
С учетом записанных выше уравнений получим |
|||||||||||
1 |
|||||||||||
|
|||||||||||
МП = Fi Vi |
Cos α1 + |
Mi |
i |
||||||||
1 |
|
||||||||||
1 |
|
|
|
|
|
|
|
|
|
||
Кинетическая энергия механизма
cостоящего из n звеньев, участвующих в поступательном и вращательном движении, определяется соотношением;
Ti = |
mV |
2 |
|
J 2 |
i i |
|
i i |
||
2 |
|
2 |
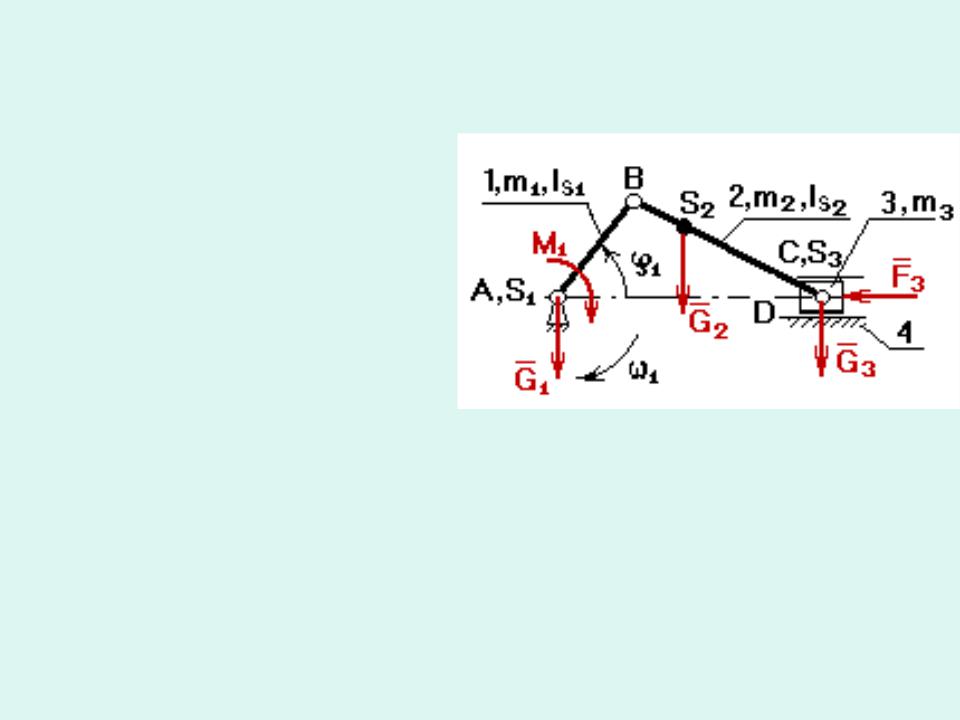
Приведение масс и моментов инерции.
Должно соблюдаться равенство
ТП = Тi
Если звено приведения совершает поступательное движение
mПVП2 |
= miVi 2 |
|
Ji i2 |
2 |
|
||
2 |
2 |
||
Откуда найдем |
mП = |
|
|
V 2 |
|
|
|
2 |
||
массу звена |
|
i |
|
|
i |
|
|
|
||
|
|
|
m |
i |
|
J |
|
i |
|
|
|
|
|
|
|
|
|
||||
приведения, |
|
|
VП |
VП |
|
|||||
Переменная приведенная масса является условной величиной (для упрощения динамических расчетов).

Если |
звено |
кинетическая энергия звена |
||
движение, то |
приведения |
|||
ТП =JП |
12 |
с моментом инерции Jn должна равняться |
||
|
2 |
|
сумме кинетических энергий звеньев |
|
механизма
Скорости определяются только положением звеньев механизма, и mп и JП являются функциями положения звена приведения.
Если звено приведения совершает поступательное движение, то mп =
f(s),
a если вращательное, то
Для большого класса механизмов тп и Jп являются постоянными величинами.
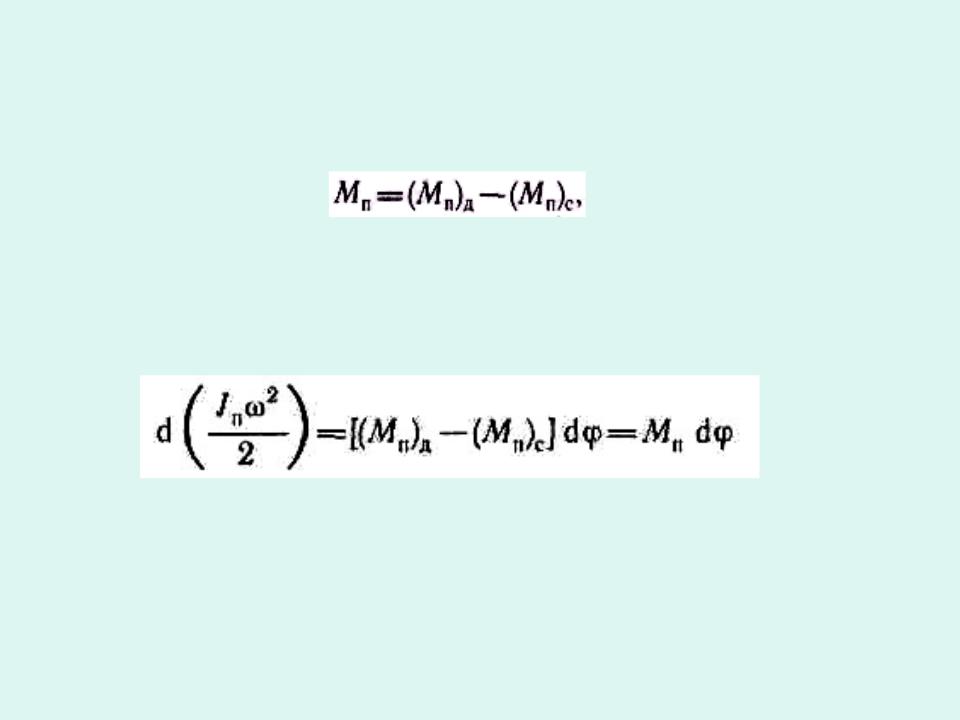
УРАВНЕНИЕ ДВИЖЕНИЯ МЕХАНИЗМА
С учетом сил сопротивления движению приведенный момент сил равен
При этом уравнение движения имеет вид
dTП = МП dφ
|
d J |
П |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|||
или MП = d |
|
|||||
Так как  то уравнение движения
то уравнение движения
дифференцируем как функцию двух независимых переменных  и Jп
и Jп
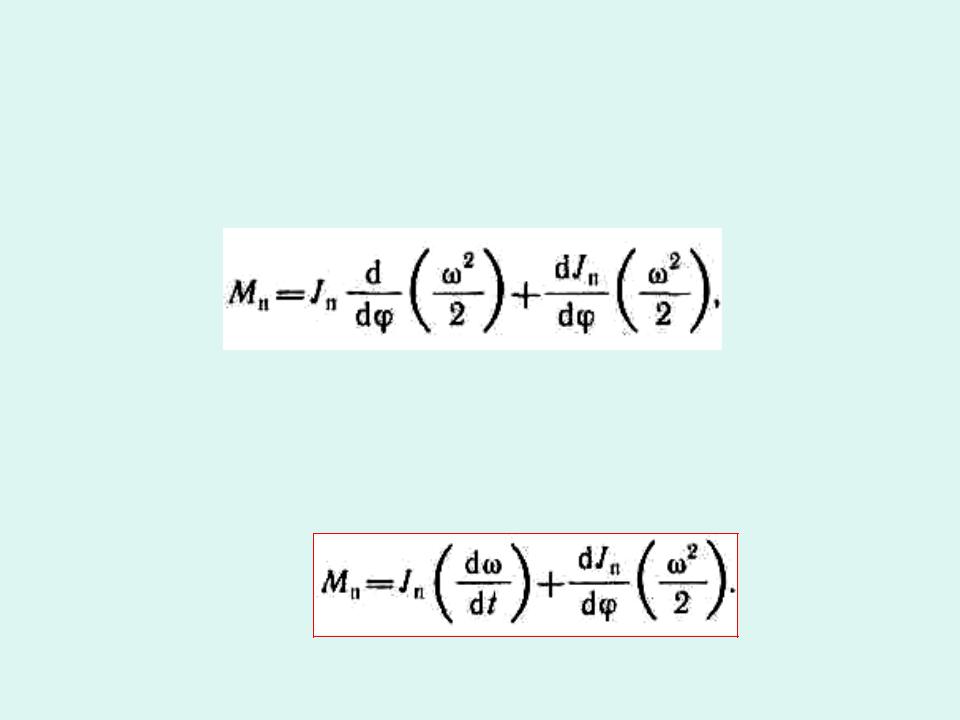
Отсюда диф.уравнение движения вращающегося
звена приведения принимает вид
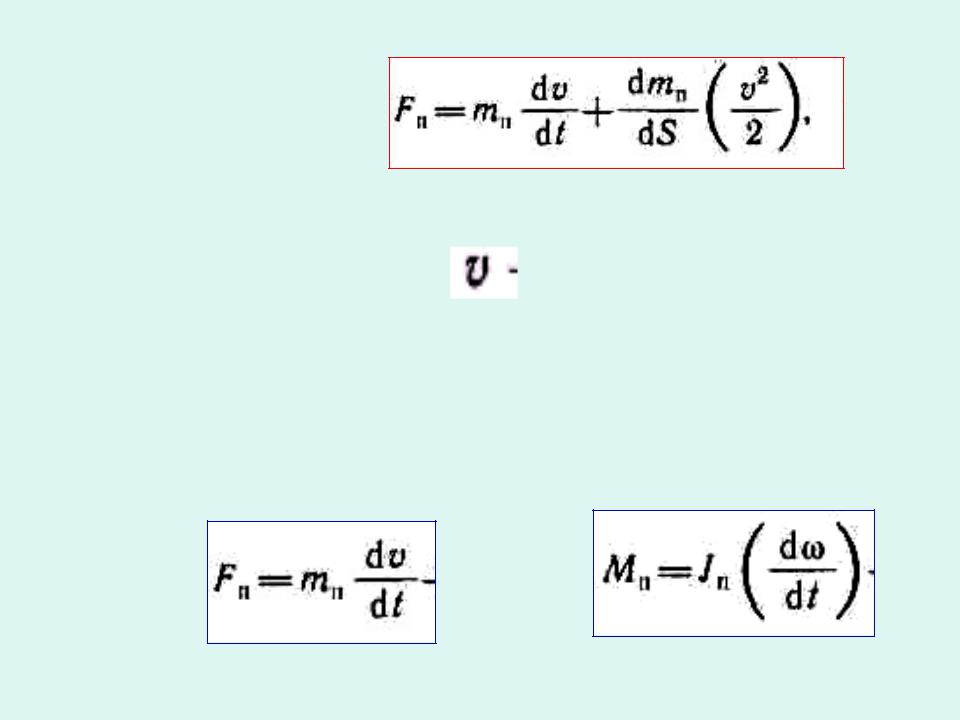
По аналогии диф.уравнение поступательно движущегося
звена приведения будет
где Fп— приведенная сила S
и
— перемещение и скорость звена приведения; mп— приведенная
масса.
В случае когда JП = const уравнения движения примут вид: