

7.4 Автоподстройка частоты
В супергетеродинном приемнике выполняется равенство расчетных (номинальных) значений промежуточной частоты fпр0 и частоты настройки фильтров усилителя промежуточной частоты (УПЧ) f00 – здесь дополнительный индекс «0» соответствует номинальным значениям частот. При соблюдении этого условия изменения спектра сигнала оказываются минимальными, так как все его составляющие располагаются внутри полосы пропускания тракта промежуточной частоты (ПЧ). На аппаратуру воздействуют различные дестабилизирующие факторы (изменения температуры, влажности и т. д.), всегда имеются погрешности в регулировке отдельных каскадов, ошибки в измерениях и др., поэтому текущие значения частот гетеродина fГ, сигнала fС и и частоты настройки f0 отличаются от расчетных значений.
Кроме того, частота fС может изменяться вследствие эффекта Доплера. В результате промежуточная частота fПР = fГ fС отличается от fпр0, f0 отличается от f00 – возникают «расстройки»:
fПР = fПР – fПР.0 и f0 = f0 – f00.
Как следствие, расходятся между собой и частоты fПР и f0, так что f1 = fПР – f0 = fПР – f0. Если «расстройки» настолько велики, что значительная часть боковой полосы спектра сигнала оказывается вне полосы пропускания тракта ПЧ, то это приводит к существенным линейным искажениям принятого сообщения.
«Расстройку» f1 можно устранить воздействием на частоты fГ, f0, а частота сигнала fС от параметров приемника не зависит. На практике частота настройки фильтров ПЧ f0 не измененяется – в качестве фильтров в УПЧ используются сложные избирательные структуры на сосредоточенных или распределенных реактивных элементах, перестройка которых возможна только в весьма небольших пределах. Влияние отклонений частоты настройки фильтров ПЧ f0 на результирующую нестабильность пренебрежимо мало, поэтому подстройка частоты гетеродина должна устранить влияние только его собственной нестабильности и нестабильности частоты принимаемого сигнала.
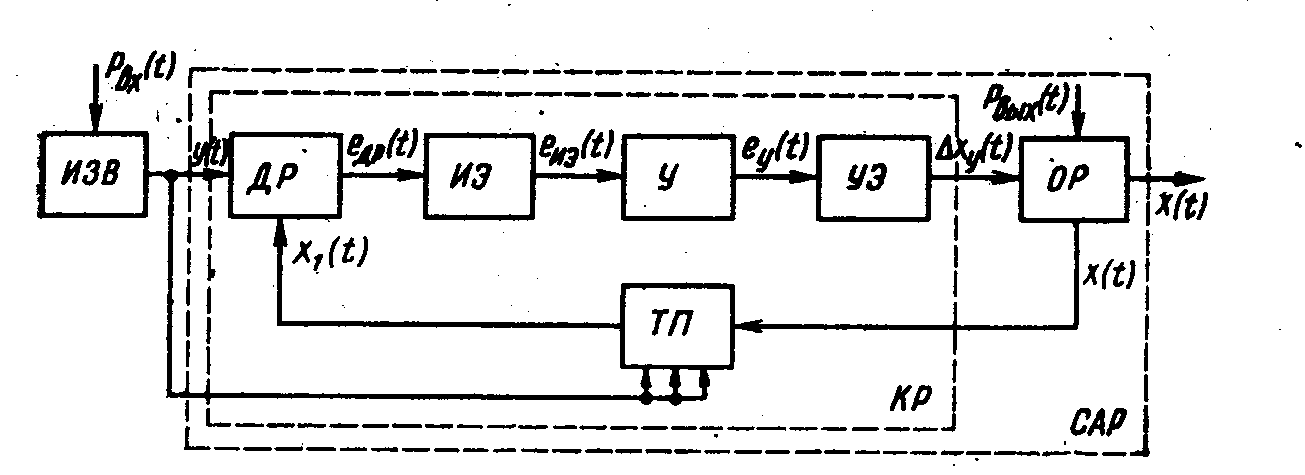
Развитие техники радиоприема – в первую очередь освоение ОВЧ и более высокочастотных диапазонов (fс > 30 МГц), повышение помехозащищенности, улучшение эксплуатационных показателей аппаратуры – привело к необходимости автоматизации подстройки частоты гетеродина. Специально разработанные радиотехнические устройства называются системами автоматической подстройки частоты (АПЧ) – по своему назначению. Системы АПЧ – одна из разновидностей класса систем автоматического регулирования (САР) – рис. 7.7.
|
Р |
КР – контур (кольцо) регулирования; ОР – объект регулирования; ИЗВ – источник задающего воздействия; ДР – датчик рассогласования; |
 ис.
7.9 – Система автоматического
регулирования
ис.
7.9 – Система автоматического
регулированияТП – тракт приведения; ИЭ – инерционный элемент; УЭ – управляющий элемент.
Состав САР: контур (или кольцо) регулирования (КР), включающий несколько звеньев, и объект регулирования (ОР). Внешний источник задающего воздействия (ИЗВ) определяет входную величину y(t), которой в любой момент t должна соответствовать выходная регулируемая величина (параметр) x(t). САР – система направленного действия (если не учитывать паразитные связи); направление действия системы указывают стрелки на рис. 7.7. Мгновенные значения параметра x(t), характеризующие состояние объекта регулирования (ОР), сравниваются в датчике рассогласования (ДР) с сигналом y(t). Для приведения регулируемой величины к масштабу, при котором возможна работа датчика рассогласования ДР, контур регулирования содержит тракт приведения (ТП), выходной параметр которого x1(t) должен содержать в себе ту же информацию об ОР, что и параметр y(t). В датчике рассогласования ДР вырабатывается сигнал ошибки еДР(t), зависящий от рассогласования между y(t) и x(t) – от разности y(t) – x1(t).
Инерционный элемент (ИЭ) придает системе необходимые динамические и спектральные свойства. Усилитель в контуре регулирования (У) служит для формирования требуемого уровня сигнала управления еУ(t), приложенного к элементу УЭ, управляющему состоянием объекта регулирования ОР. Эффективная работа систем автоматического регулирования (САР) возможна при условии, что в КР создается ООС по регулируемому параметру. Только в этом случае управляющее (корректирующее) воздействие xУ(t), выработанное управляющим элементом (УЭ), будет направлено в сторону компенсации возникшего между x(t) и y(t) несоответствия. Часто в АПЧ y(t) не только воздействует на датчик рассогласования (ДР), но и участвует в приведении x(t) к x1(t). Распространен вариант построения системы автоматического регулирования (САР), при котором y(t) воздействует только на тракт приведения ТП, а вся информация о рассогласовании между x(t) и y(t) содержится в величине x1(t), сравниваемой в датчике рассогласования (ДР) с его внутренним параметром. На работу системы автоматического регулирования САР влияют не только сигналы, но и препятствующие нормальной работе системы вредные возмущения – внутренние рВЫХ(t) и внешние рВХ(t) – рис. 7.7. Систему автоматического регулирования можно интерпретировать как активный фильтр, предназначенный для передачи сигнала на выход с наименьшими искажениями. Система автоматического регулирования должна подавить нежелательные компоненты с наименьшими искажениями сигнала.
В зависимости от вида задающего воздействия на систему автоматического регулирования различают два типа САР: следящие системы и системы стабилизации. В следящих системах входная величина y(t) изменяется во времени, в системах стабилизации y(t) – постоянная величина.
Рассматривая систему АПЧ как частный пример системы автоматического регулирования, следует пояснить физический смысл y(t) и x(t) – на датчик рассогласования (ДР) воздействуют не сами эти величины, а сигналы с параметрами квазигармонических колебаний: частота f или фаза . Между частотой и фазой существует однозначная связь, которая для приращений и имеет вид =t (при = const) или в более общем случае
(t)
=
![]() (t)
dt
(7.3)
(t)
dt
(7.3)
Для получения сигнала ошибки можно ориентироваться как на частоту, так и на фазу колебаний и в основе датчика рассогласования (ДР) использовать частотный (ЧД) или фазовый (ФД) детектор. По этому признаку различаются три класса систем: частотная (ЧАПЧ), фазовая (ФАПЧ) и комбинированная частотно-фазовая автоподстройка частоты (ЧФАПЧ). Между ЧАПЧ и ФАПЧ много общего, однако, и различия между ними весьма существенны.
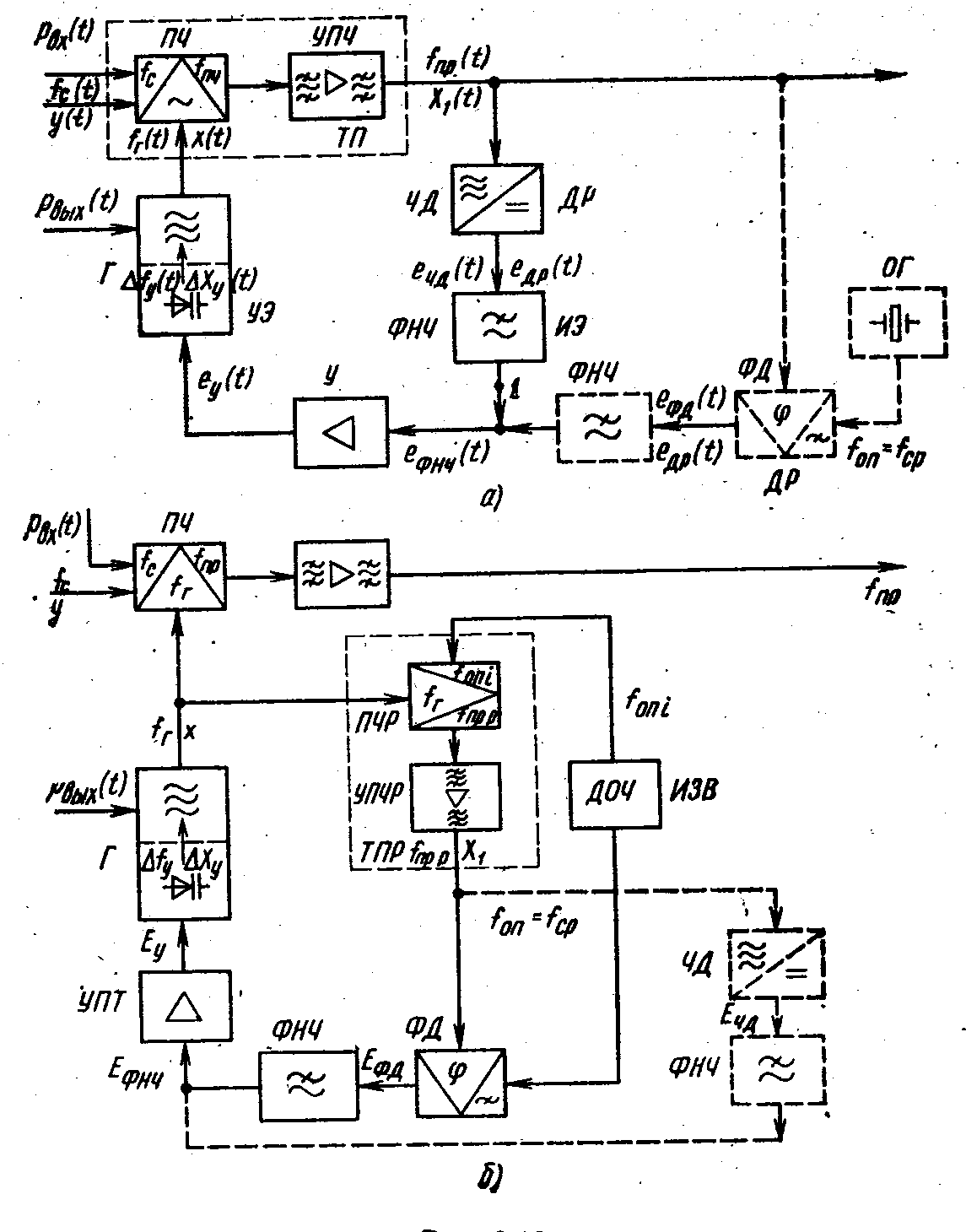
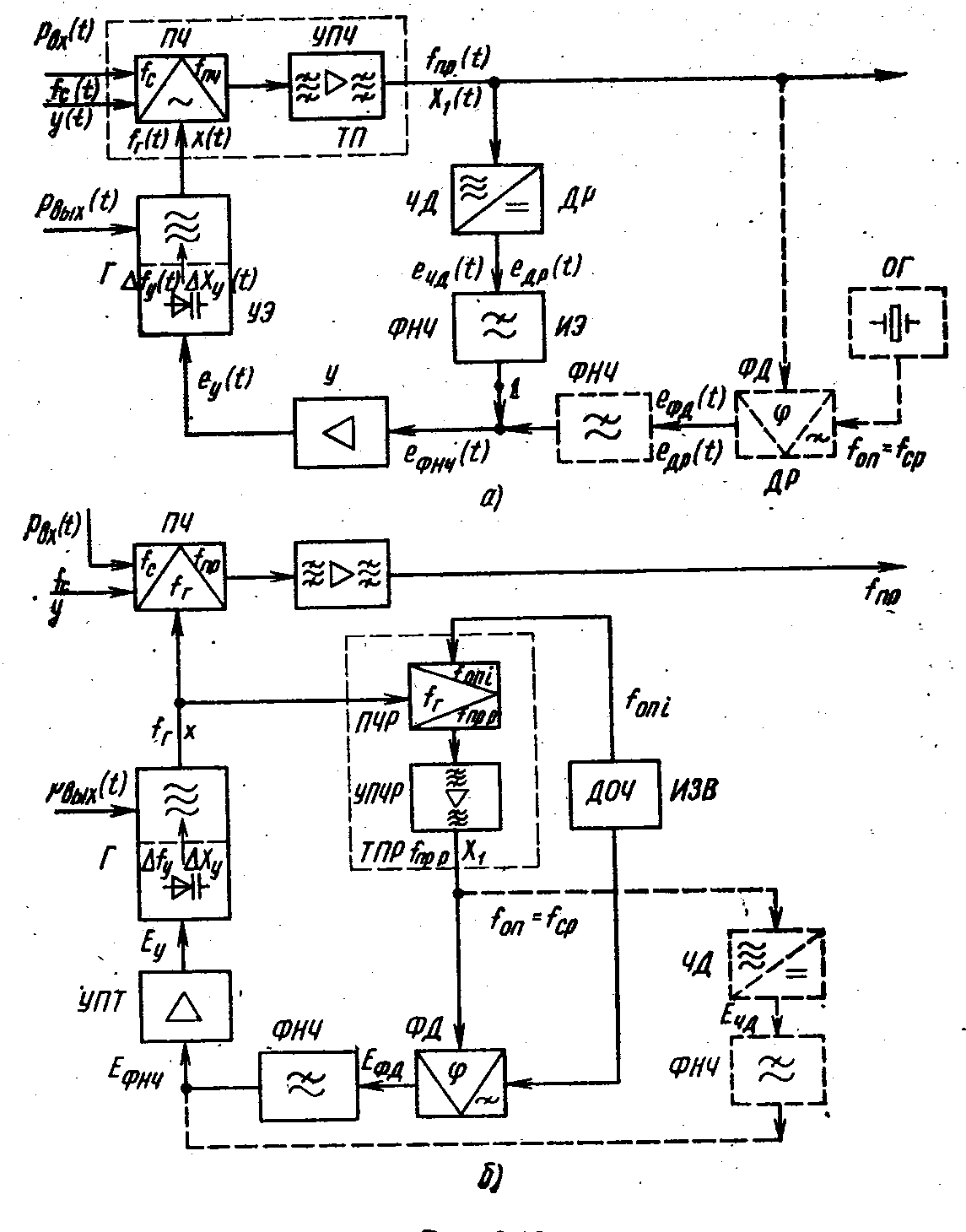
Структурные схемы систем АПЧ гетеродина, выполняющих функции слежения и стабилизации частоты, приведены на рис. 7.10.
Для упрощения на рисунках не изображены входные цепи (ВЦ) и усилители радиочастоты (УРЧ) приемника.
|
Р |
ТП – тракт приведения; ПЧ – преобразователь частоты; ЧД – частотный детектор; Г – гетеродин; ДР – датчик рассогласования; УЭ – управляющий элемент; ФД – фазовый детектор; |
 ис.
7.10 – Структурная схема системы АПЧ
гетеродина, выполняющая функцию
слежения
ис.
7.10 – Структурная схема системы АПЧ
гетеродина, выполняющая функцию
слежения
На рис.7.10, а) не показан источник задающего воздействия – здесь задающее воздействие, и внешняя помеха образуются в окружающем пространстве. Наименования некоторых звеньев АПЧ отличаются от принятых в САР – на рис. 7.10 их названия дублируются в соответствующих терминах – рис. 7.7. Сплошными линиями показаны следящая ЧАПЧ и система стабилизации ФАПЧ, штриховыми линиями – следящая ФАПЧ и система стабилизации ЧАПЧ.
На рис. 7.10, а) тракт приведения ТП состоит из преобразователя частоты (ПЧ) и УПЧ, входящих в линейный тракт приемника. Изменения частоты принимаемого сигнала fС(t) (задающего воздействия) должны отслеживаться регулируемой (выходной) величиной fГ(t) с тем, чтобы разность между ними в любой момент была как можно ближе к fГ(t). Этот эффект достигается благодаря сравнению в частотном детекторе (ЧД) мгновенного значения частоты fПР(t) с внутренним параметром частотного детектора – переходной частотой fД. Сигнал ошибки еЧД(t) после фильтрации и усиления преобразуется в управляющее напряжение еУ(t), приложенное к управляющему элементу УЭ. Под воздействием еУ(t), частота fГ(t) изменяется на fГ(t) в сторону уменьшения рассогласования между fС(t) и fГ(t). Управляющий элемент (УЭ) обычно входит в колебательный контур автогенератора – гетеродина (Г).
Если стабильности частот fД и f0 одинаковы, то система ЧАПЧ выполняет функцию слежения за частотой настройки контуров УПЧ. В следящей системе ФАПЧ (ЧАПЧ разомкнута в точке 1) сигнал ошибки еФД – функция разности фаз, сравниваемых в детекторе ФД колебаний с промежуточной частотой fПР(t) и опорной частотой fОП. Колебание с частотой fОП формируется в опорном (эталонном) генераторе ОГ. Стабильность опорной частоты fОП, называемой в дальнейшем частотой сравнения fСР, определяется кварцевым резонатором. При отклонении fПР(t) от fОП напряжение еУ(t) будет изменяться в сторону уменьшения и ликвидации этого расхождение – под влиянием управляющего напряжения еУ изменяется частота колебаний гетеродина.
Процессы в системе автоматической стабилизации fГ протекают с физической точки зрения аналогично рассмотренным выше системам, хотя в структурных схемах, приведенных на рис. 7.10, а) и б), много различий.
|
Р |
fпр
ИЗВ – источник задающего воздействия; ДОЧ – датчик опорных частот; ТПР – тракт приведения контура регулирования; |
 ис.
7.10,
б)
– Структурная схема системы АПЧ
гетеродина, выполняющая функцию
стабилизации частоты
ис.
7.10,
б)
– Структурная схема системы АПЧ
гетеродина, выполняющая функцию
стабилизации частоты
Во-первых, на рис. 7.10, б) тракт приведения контура регулирования ТПР включает в себя обособленные от линейного тракта приемника каскады ПЧР и УПЧР. Во-вторых, источник задающего воздействия (ИЗВ) на рис. 7.10, б) – датчик опорных частот (ДОЧ), в котором формируется сетка из n дискретных частот fОП1, … , fОПi , … , fОПn. При анализе работы системы автоподстройки (рис. 7.10, б) отклонением частоты сигнала fС от номинального значения fС0 можно пренебречь. Частота fГ в результате действия АПЧ должна быть как можно более стабильной, если, разумеется, принять, что f0 = f00. Система автоматической стабилизации частоты выполняет по существу функции активного фильтра, выделяющего колебания той или иной частоты сетки опорных частот и подавляющего побочные комбинационные продукты, возникающие в ДОЧ. Датчик опорных частот совместно с АПЧ образует одну из разновидностей синтезаторов сетки частот (ССЧ). Выходным каскадом ССЧ служит гетеродин с номинальными частотами fГ1, …, fГi, …, fГn. Если приемник должен быть настроен на номинальную частоту сигнала fС0, то в ССЧ синтезируется такая частота fГi, которая удовлетворяла бы условию fГi = fС0 + fПР0. При использовании ФАПЧ в схеме рис. 7.10, б) в ДОЧ формируется также частота fОП = fСР. Если fГ fГi, то fПР.Р отличается от fСР и в системе возникает управляющее воздействие fУ(t), компенсирующее «расстройку» fГ относительно fГi. Включение ЧАПЧ и ФАПЧ в общий контур регулирования образует комбинированную систему ФАПЧ.