ОКПМ РЭС / лаба2
.docРабота № 2
МОДЕЛИРОВАНИЕ ЛИНЕЙНЫХ И НЕЛИНЕЙНЫХ СИСТЕМ
Цель работы.
-
Ознакомление с основными возможностями пакетов SIGNAL PROCESSING TOOLBOX и CONTROL SYSTEM TOOLBOX системы MATLAB, а также с библиотеками блоков системы SIMULING для проектирования, моделирования и исследования линейных динамических систем, в частности, цифровых фильтров.
-
Ознакомление с основными возможностями системы SIMULINK для проектирования, моделирования и исследования нелинейных динамических (инерционных) систем
Ознакомление с основными возможностями системы SIMULINK для моделирования безынерционных нелинейных систем, в частности, нелинейных усилительных каскадов.
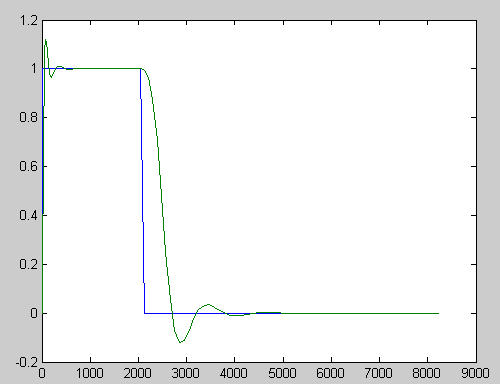
1. Смоделировать прохождение прямоугольного импульса через этот фильтр (для формирования импульса можно воспользоваться, например, блоком SIMULINK\ SOURSES\ STEP; можно также вместо единичного импульса сформировать периодическую последовательность таких импульсов с помощью блока PULSE GENERATOR), воспользовавшись блокоми TRANSFER FCN и (или) ZERO-POLE библиотеки SIMULINK\ CONTINUOUS. Подобрать длительность импульса так, чтобы было заметно влияние НЧ-фильтра. Смоделировать переходную характеристику фильтра, подав на его вход единичный скачек. При выполнении этого пункта задания необходимо установить переменный шаг модельного времени.

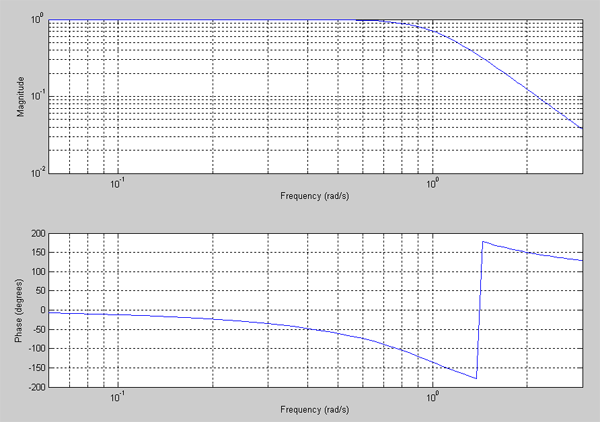
[z,p,k]=buttap(3)
[b,a]=zp2tf(z,p,k)
ww=0:3/50:3
h=freqs(b,a,ww)
plot(ww,abs(h))
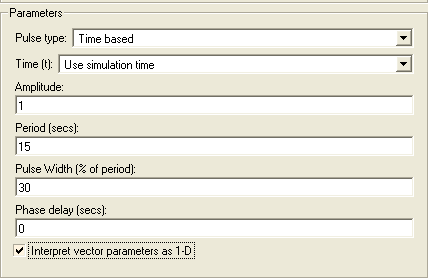
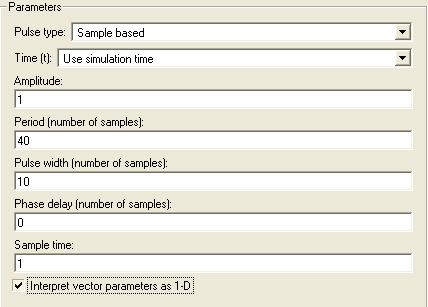
Source Block Parameters: Pulse Generator
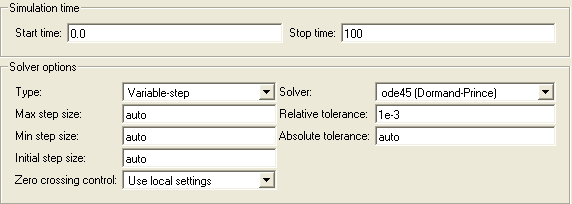
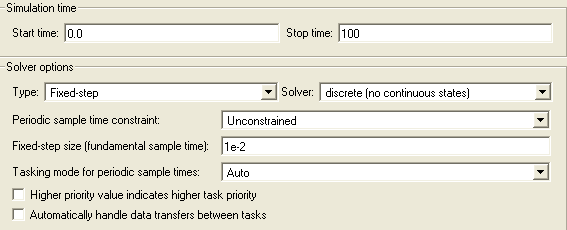
Configuration parameters:
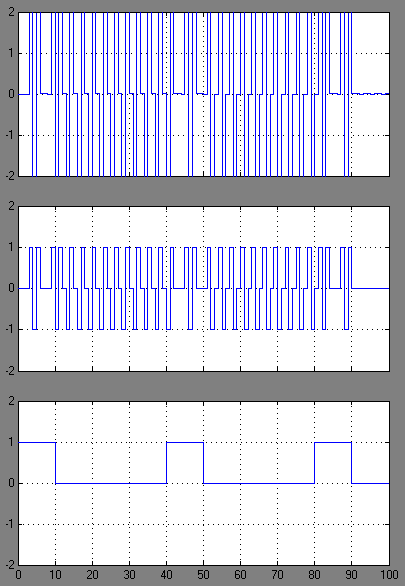
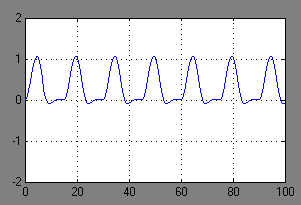
Сигнал на выходе Scope:
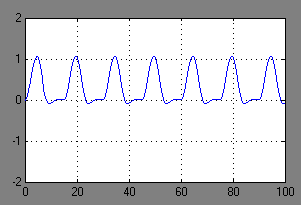
Сигнал на выходе Scope1:
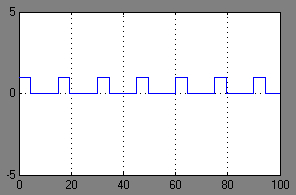
Сигнал на выходе Scope2:
2. Смоделировать тот же процесс прохождения прямоугольного импульса через цифровой фильтр, воспользовавшись блоками DISCRETE TRANSFER FCN и (или) DISCRETE FILTER библиотеки SIMULINK\ DISCRETE. При выполнении этого пункта задания необходимо установить фиксированный шаг модельного времени Δt = 1/(2Fmax), где Fmax - наибольшая учитываемая частота в спектре моделируемого сигнала.
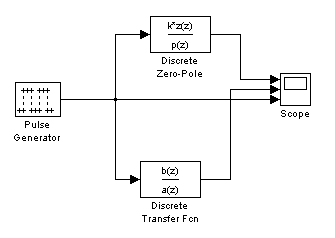
Source Block Parameters: Pulse Generator
Simulation Parameters:
Сигнал на выходе Scope: