

Прикладная механика / 2
.doc
 Рассмотрим
систему с η=100% ,РВХ
=РВЫХ :
Рассмотрим
систему с η=100% ,РВХ
=РВЫХ :
TВХ* ωВХ=ТВЫХ*ωВЫХ
Если ωВХ> ωВЫХ , то TВХ< ТВЫХ ---Редуктор
Если ωВХ< ωВЫХ , то TВХ> ТВЫХ ----Мультипликатор
Кинематика зубчатых передач.
1.Простейший механизм с неподвижными осями вращения и цилиндрическими колесами:
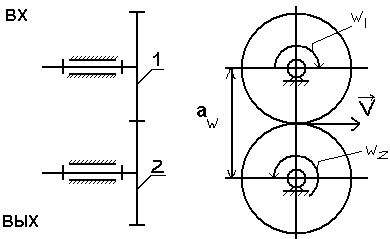
ω1* r1= ω2*r2=V, ω1/ ω2 = r ω2 /r ω1 ; r ω1, r ω2 -----радиусы начальных окружностей
r ω2+ r ω1=aw----межосевое расстояние
1-вход,2-выход
і12= (ω1/ ω2)----передаточное отношение
і12= ω1/ ω2= r ω2 /r ω1=2π r ω2/2π r ω1=pz2/pz1=z2/z1.
і12= ω1/ ω2= -z2/z1----внешнее зацепление


і 12= ω1/ ω2= z2/z1----внутреннее зацепление
і12= ω1/ ω2= -z2/z1----внешнее зацепление
2.Рядовые зубчатые механизмы.
В этих механизмах используется несколько зубчатых колес с неподвижными осями вращения.
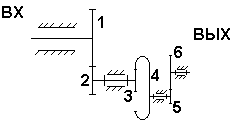
. і АВ=?
. і АВ= ωA/ ωB= ωA ω1 ω2 ω3 ω4 ω5 ω6/( ωB ω1 ω2 ω3 ω4 ω5 ω6 )= (ωA/ ω1)( ω1 /ω2 )( ω2 /ω3 )( ω3 /ω4)( ω4 /ω5) ( ω5 ω6)( ω6/ ωB )=1*(-z2/z1 )*1*(-z4/z3)*1*( -z6/z5)*1=-z2z4z6/(z1z3z5)