

6.3. Динамика фрикционного сцепления
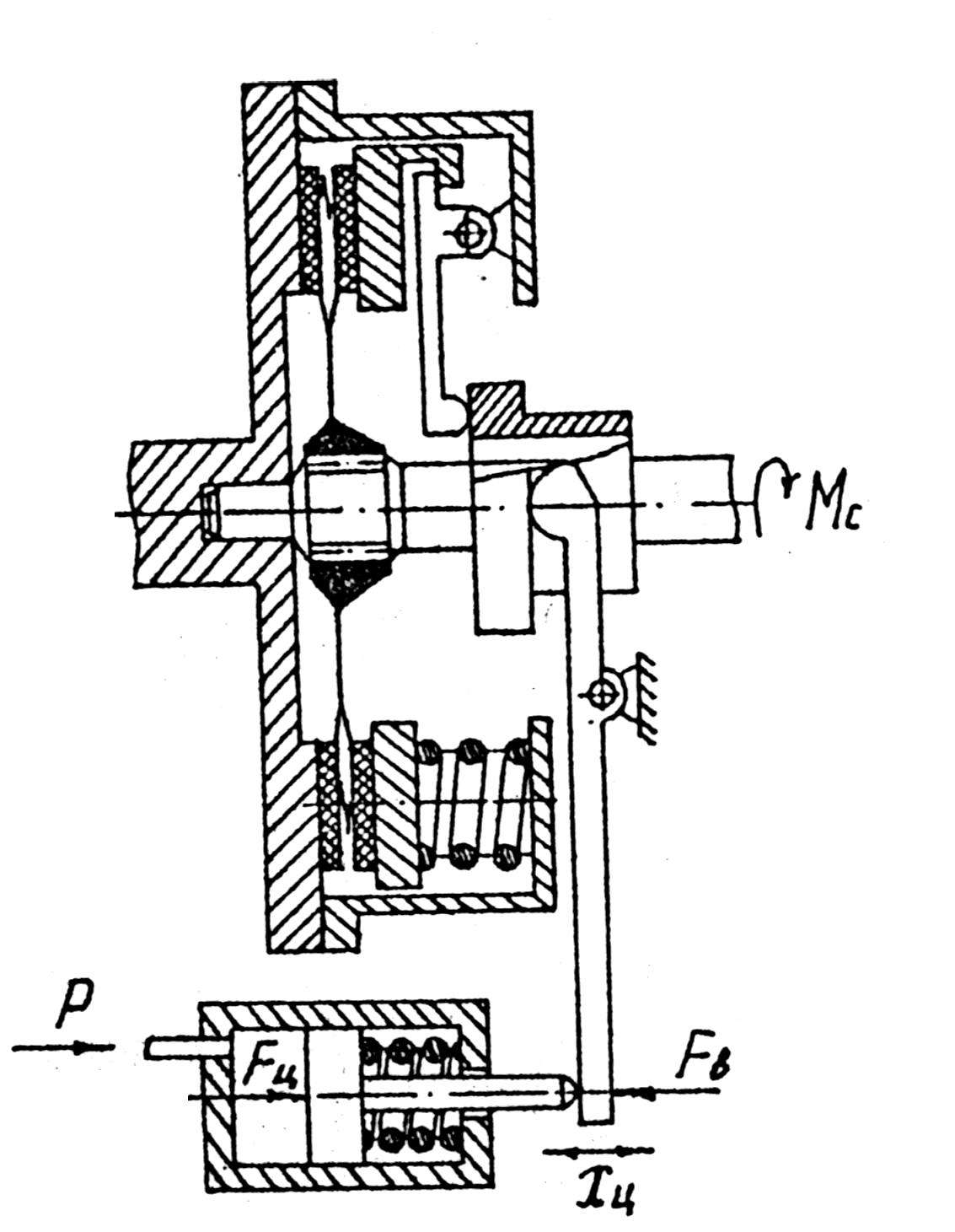
Фрикционное сцепление является объектом регулирования, и поэтому его характеристики во многом определяют качество работы системы. На рис.б.5 приведена расчетная схема постоянно-замкнутого сцепления.
а
б
Рис 6.5. Расчетная (а) и структурная (б) схемы муфты сцепления.
Допускаем, что жесткость ведомого диска в осевом направлении является линейной функцией от осевой деформации диска. Будем определять передаточную функцию рассматриваемой системы в виде
W(s) = Mc (s)/p(s) (6.8)
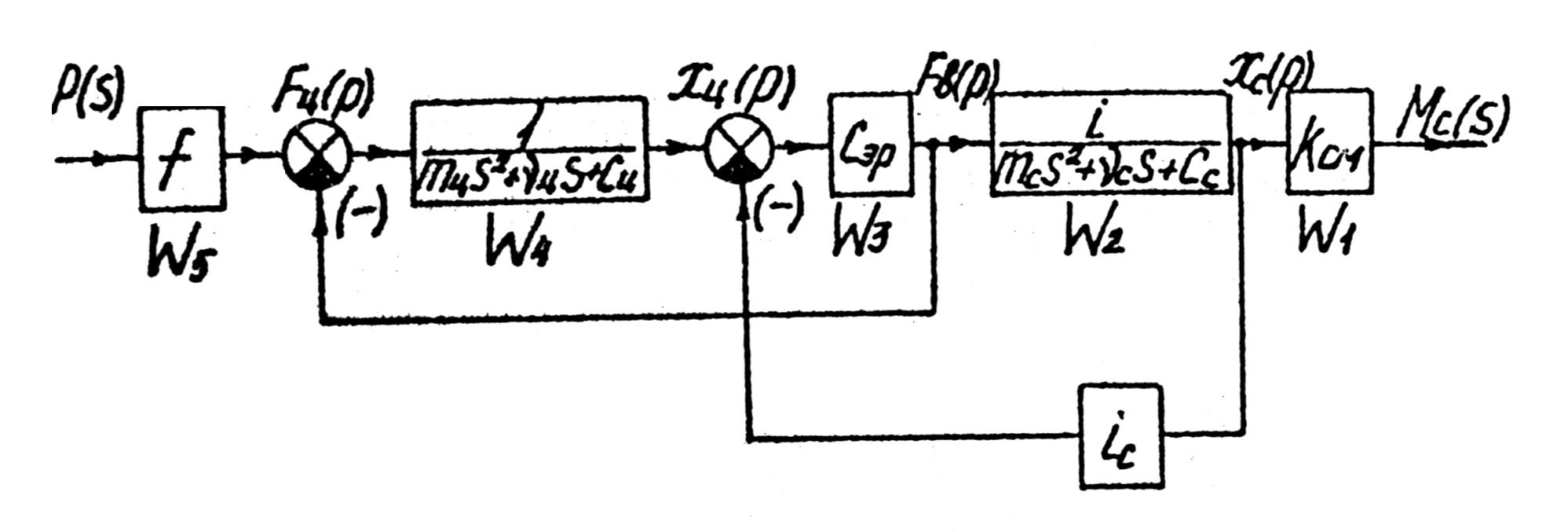
Здесь Mc(s) - изображение выходного параметра (момента трения сцепления, a p(s) - изображение входного параметра (давление в исполнительном цилиндре). Для того, чтобы получить передаточную функцию системы необходимо составить структурную схему (рис.б.З:).
На структурной схеме обозначены следующие передаточные функции:
W1 = Mc(s) /Xc(s) = Kcm (6.9)
где Хc - деформация ведомого диска. Mc - момент трения сцепления.
Кcm - коэффициент усиления сцепления по моменту (Кcm = у R Сb), Сb - жесткость ведомого диска при его деформации, у - коэффициент трения накладок ведомого диска, R - средний радиус поверхности трения.
W2 = Xc(s)/Fb(s) = i/(mcs2 + vcs +Cb + Cm (6.10)
где Fb - сила, приложенная к концу вилки выключения сцепления,
i - коэффициент усиления сцепления по силе,
mc - эквивалентная масса подвижных частей, приведенная к
нажимному диску,
vc - коэффициент вязкого трения в механизме выключения,
Сm - жесткость нажимных пружин.
W3 = Fb(s)/(Xu(s) – Xc(s)Ic) = C3p (6.11)
где- Xu - перемещение штока сервоцилиндра.
C3p-эквивалентная жесткость вилки, рычагов и т.д.
(6.12)
W4 = Xu(s) / (Fu(s) – Fb(s)) = 1/(mus2 + vus +cu) (6.12)
где Fu - сила на поршне сервоцилиндра от давления жидкости,
mu - масса подвижных частей сервоцилиндра,
vu - коэффициент вязкого трения в сервоцилиндре,
cu - жесткость возвратной пружины сервоцилиндра.
W5 = Fu(s) /p(s) = f (6.13)
где f - площадь поршня исполнительного цилиндра.
Выполнив эквивалентные преобразования полученной структурной схемы, легко получить передаточную функцию системы "исполнительный цилиндр - фрикционное сцепление", которую и необходимо учитывать при анализе динамических свойств автоматизированного сцепления в целом.
Анализ показывает, что для улучшения динамических свойств необходимо по возможности уменьшать массы подвижных частей исполнительного цилиндра и увеличивать жесткость возвратной пружины.