

ГЛАВА 7. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ МЕХАНИЗМОВ С ЖЕСТКИМИ ЗВЕНЬЯМИ
J (q)q
Приведенный момент инерции
7.1. Внутренняя виброактивность механизма
Рассмотрим цикловой механизм с жесткими звеньями и идеальными кинематическими парами.
Запишем уравнение движения механизма:
1 |
|
2 |
Q QC (q, q). |
(7.1) |
|
||||
2 |
J (q)q |
|
||
|
|
|
|
J(q):
J (q)
1 2 i
J (q) J0 J (q) 2 i 0 J (q)dq J (q),
– переменная часть приведенного момента инерции механизма. Приведенный момент сил сопротивления:
Q |
(q,q) Q |
|
(q) Q |
(q,q), |
||||
C |
|
|
C0 |
|
|
C |
|
|
|
|
|
1 |
2 i |
|
|
|
|
Q |
|
(q) |
|
Q |
(q, q)dq |
|||
|
|
|||||||
C 0 |
|
|
C |
|
|
|||
|
|
|
2 i |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.2)
(7.3)
(7.4)
Установившееся движение.
Предположим, что входное звено вращается с постоянной угловой скоро-
стью q 0 |
. Найдем обобщенную движущую силу (момент), которую нужно |
|||||
приложить |
к входному |
звену, |
чтобы осуществить такое |
движение |
||
( q 0 ,q 0t,q 0, ). |
|
|
|
|
|
|
|
Q(t) |
1 |
|
2 |
( 0 ) Q(t), |
(7.5) |
|
|
|
||||
|
2 |
J ( 0t) 0 QC ( 0t, 0 ) QC 0 |
||||
|
|
|
|
|
|
|
Q(t) – переменная часть движущего момента. |
|
|
||||
Противоположный по знаку момент |
|
|
|
|||
|
|
|
L(t) Q(t), |
|
(7.6) |
|
действующий на двигатель со стороны механической системы, называется возмущающим моментом. Способность механизма создавать переменный возмущающий момент при равномерном вращении входного звена отражает его
внутреннюю виброактивность.
181
Возмущающий
T 2 i / |
2 / , |
0 |
|
механизма.
момент является периодической функцией t с периодом где – угловая скорость входного звена исполнительного
|
|
L(t) Lk cos(k t k ). |
(7.7) |
k 1 |
|
Внутренняя виброактивность механизма является причиной многих нежелательных динамических явлений, возникающих в цикловых машинах.
7.2. Способы уменьшения возмущающего момента
Разгружатели. Разгружателями называются дополнительные устройства, а) которые вводятся в механизм и уменьшают возму-
щающий момент, вызываемый этим механизмом.
с |
A |
R 12 |
2 |
|
|
|
Разгружатель должен быть спроектирован так, |
||
|
|
|
||
|
|
|
|
|
s |
|
R 21 |
|
чтобы обеспечивалось выполнение условия: |
|
|
|
|
|
O |
|
Mp L 0, |
(3.18) |
q |
h |
1 |
|
|
|
Мр – момент кулачкового разгружателя. |
|
||
|
|
|
||
|
б) |
|
Мр=R21h. |
(3.19) |
|
V |
|
||
|
|
|
|
|
|
VA1 |
VA2 |
Для того, чтобы найти плечо h силы R21, постро- |
|
|
PV |
|||
|
|
им план скоростей механизма (см. рис. 3.13, б). |
|
|
|
|
|
|
|
Рис. 3.13
отсюда найдем h:
Уравнение статики:
|
V |
A1 |
|
OA |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
A2 |
OB |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
|
|
|
VA2OA |
|
VA2OA |
|
|
|
|
|
|
|
|||
h OB |
|
|
|
dt |
|
s |
|
. |
|||||
VA1 |
|
qOA |
|
dq |
|
|
|||||||
dt
(3.20)
(3.21)
R |
c(s |
s) |
21 |
0 |
|
с – жесткость пружины,
s0 – первоначальное поджатие пружины,
,
(3.22)
182
С учетом (3.21) и (3.22) условие (3.18) запишем в виде:
|
|
ds |
|
n |
|
|
|
|
||
c(s0 |
s) |
L cos( |
q |
) . |
||||||
dq |
||||||||||
|
|
|
1 |
|
|
|
||||
Разделяя переменные в (3.23) и интегрируя, получим: |
||||||||||
|
|
s |
2 |
|
n |
1 |
|
|
|
|
0 |
|
|
|
|
L sin( |
q |
1 |
|||
|
|
|
|
|||||||
cs s c |
2 |
|
|
) C |
||||||
|
|
|
1 |
|
|
|
|
|||
С1 – постоянная интегрирования.
,
(3.23)
|
n |
1 |
|
|
|
|
Обозначим |
|
L sin( q |
) |
|||
|
||||||
|
1 |
|
|
|
|
|
толкателя в виде: |
|
|
|
|
||
|
|
|
|
cs |
||
|
|
|
s(q) |
|
0 |
|
|
|
|
|
|
||
C |
|
1 |
|
|
c |
y(q
2 |
2 |
|
s |
|
0 |
c |
|
) ,
получим
2cy(q) |
. |
|
закон перемещения
(3.24)
Постоянную интегрирования С1 выбираем так, чтобы подкоренное выражение в (3.24) при любом q было неотрицательным. На этом заканчивается первый этап и начинается второй.
Следует отметить, что полная разгрузка механизма только при одном значении угловой скорости. Поэтому в переходных режимах кулачковый разгружа-
тель целесообразно отключать. |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
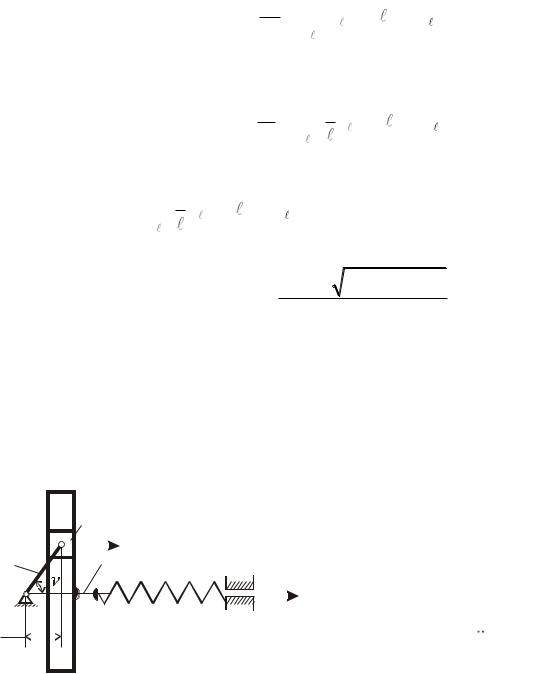
Пружинный разгружатель. |
|
|||
|
|
|
|
2 |
|
|
|
Потребуем выполнения условия: |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
B |
|
|
R |
|
|
R1 + Ф = 0. |
|
(7.8) |
|||
|
|
|
|
|
|
|
|
|
|||||
|
1 |
|
|
|
|
|
|
|
|||||
|
r |
|
|
|
|
|
|
|
|||||
|
|
|
3 |
|
|
|
|
||||||
|
|
|
|
c |
|
R1 – упругая сила пружины, |
|
||||||
|
|
|
t |
|
|
R1=-cx |
|
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||
A |
|
D |
|
Ф – сила инерции массивного звена 3 |
|||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
x |
|
|
m |
|
|
x r cos t , |
x r 2 cos t , |
|||||
|
|
|
|
|
|
|
|
|
D |
|
|
D |
|
|
|
|
|
|
|
|
|
|
Ф mr |
2 |
cos t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Рис. 7.2 |
|
|
cr cos t mr 2 cos t 0 . |
|
|||||
|
|
|
|
|
|
|
|
|
(7.9) |
||||
Если жесткость пружины c m 2 , будет происходить разгрузка кинематических пар В и А от силы инерции Ф.
Разгружатели, уменьшая возмущающий момент, создают переменные силы, действующие на корпус машины.
Избежать этого можно, применяя динамические гасители.
183
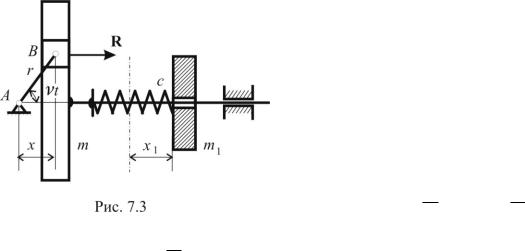
Динамические гасители.
В этом случае инерционная сила, создаваемая движущей кулисой, компенсируется силой инерции динамического гасителя, передаваемой через пружину.
Уравнения движения масс m и m1:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cx1 R |
, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 x x1 cx1 . |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Потребуем |
|
выполнения |
условия |
R 0. |
||||||||||||||
|
|
|
|
|
|
|
|
Подставим |
x1 |
c |
|
, |
|
c |
|
|
во |
второе |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
x1 |
|
x |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
m |
m |
|
|
|
m |
|
|
m |
|
|
|
||||||
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
0 . |
|
|
|
|
|
|
|
||||||||||
уравнение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
m1 x |
|
x |
mx |
или x |
|
|
|
|
|
cx |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
c |
|
|
|
|
|
|
m m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При равномерном вращении |
x r cos t , x r |
2 |
|
cos t , x r |
4 |
cos t . |
|||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
m m |
c |
|
0 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
r 2 cos t 2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
m m |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Эффект динамического гашения достигается при |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
c mm (m m ) |
1 |
|
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отметим, что при этом масса m1 |
не может быть слишком малой. Во-первых, |
||||||||||||||||||||||||||
потому, что |
при |
малой |
массе |
ее |
перемещение |
становится |
очень большим |
||||||||||||||||||||
( x1max rm / m1, где r – радиус кривошипа); во-вторых, из-за трения, которое при малой массе может существенно снизить эффект динамического гашения.
7.3. Внешняя виброактивность механизма и машины
R0 , R1, R2 , R3 – внешние реакции.
Способность механизма возбуждать переменные силы, действующие на корпус, называется его внешней виброактивностью.
Уравновешивание механизмов и машины.
Механизм называется уравновешенным, если его переменные во времени внешние реакции при любом законе движения образуют в каждый момент времени уравновешенную систему сил (главный вектор и главный момент внешних реакций равны нулю).
184
Рассмотрим некоторый механизм, имеющий N подвижных звеньев. Составим для каждого из этих звеньев уравнения кинетостатики
|
|
|
|
P |
(e) |
P |
(i) |
Ф |
|
R |
(e) |
R |
(i) |
0; |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
k |
|
|
|
k |
|
|
|
k |
|
|
k |
|
|
|
k |
|
|
|
|
(7.10) |
||
|
|
|
|
M |
( Pe) |
M |
( Pi) |
M |
(Ф) |
M |
(Re) |
M |
( Ri) |
0. |
||||||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
0k |
|
|
|
|
0k |
|
|
|
0k |
|
|
0k |
|
|
0k |
|
|
|||
(e) |
– сумма внешних активных сил, приложенных к k-му звену; |
|
||||||||||||||||||||||||
Pk |
|
|||||||||||||||||||||||||
P(i) |
– сумма внутренних активных сил; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Φk |
– главный вектор сил инерции звена; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
(e) |
– сумма сил, воздействующих на звено со стороны стойки; |
|
||||||||||||||||||||||||
Rk |
|
|||||||||||||||||||||||||
R(ki) – сумма внутренних реакций связи; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(Pe) |
(Pi) |
(Ф) |
(Re) |
|
|
( Ri) |
– главные моменты соответствующих сил относи- |
|||||||||||||||||||
M0k |
,M0k |
,M0k |
,M0k ,M0k |
|
||||||||||||||||||||||
тельно некоторого центра 0.
Сложим уравнения (7.10), соответствующие всем k от 1 до N. третьим законом Ньютона
N |
|
|
N |
|
k |
|
N |
|
0k |
|
N |
|
0k |
k |
|
|
|
|
|
|
|
|
|
||||
P |
(i) |
0; |
|
R |
(i) |
0; |
|
M |
( Pi) |
0; |
|
M |
( Ri) |
|
|
|
|
|
|
|
|||||||
k 1 |
|
|
k 1 |
|
|
|
k 1 |
|
|
|
k 1 |
|
|
Получаем
В соответствии с
0, |
(7.11) |
P |
(e) |
,Ф,R |
(e) |
|
|
P |
(e) |
Ф R |
|
|
– главные векторы, а
(e) |
0;M |
( Pe) |
|||
|
0 |
|
|||
|
|
|
|
||
M |
( Pe) |
,M |
(Ф) |
, |
|
0 |
0 |
||||
|
|
|
|||
M |
(Ф) |
M |
(Re) |
0, |
|
0 |
|
0 |
|||
|
|
|
|
||
(Re) |
– главные моменты. |
||||
M0 |
|
||||
(7.12)
Для уравновешенности механизма в соответствии с принятым определением необходимо и достаточно выполнение условий
R(e) 0,M(Re) 0. |
(7.13) |
0 |
|
Из (7.12) следует, что для этого должны выполняться условия
P |
(e) |
Ф 0;M |
(Pe) |
M |
(Ф) |
0. |
|
0 |
0 |
||||
|
|
|
|
|
(7.14)
т.е. внешние активные силы и силы инерции звеньев механизма должны в совокупности составлять уравновешенную систему сил.
Если все внешние активные силы, приложенные к звеньям механизма, являются внутренними для машины в целом, уравновешенность машины будет обеспечиваться при выполнении условий
Ф 0,M(Ф) 0, |
(7.15) |
0 |
|
т.е. при уравновешенности сил инерции.
185
Q
7.4.Внешняя виброактивность вращающегося ротора
ироторной машины
y  MC
MC
 C
C
О
х
Существует множество машин, в которых единственным подвижным звеном является ротор, совершающий вращательное движение.
Q – движущий момент; |
|
|
|||||
МС – |
момент сил сопротивления; |
|
|||||
– |
угловая скорость; |
|
|
||||
– угловое ускорение; |
|
|
|||||
Уравнения |
|
кинетостатики (МC, |
Q – |
||||
внешние силы): |
|
|
|
|
|||
|
R |
(e) |
Ф |
|
m( x |
y ), |
|
|
|
|
|
2 |
|
|
|
|
x |
|
x |
c |
c |
|
|
|
|
(e) |
|
|
2 |
|
(7.16) |
|
Ry |
Ф y m( yc xc ), |
|||||
z
Рис.7.5
R |
(e) |
Ф |
|
0, |
|
|
|
|
|
|
|
|
|||
|
z |
|
|
|
|
|
|
|
|
||||||
M |
z |
|
|
|
J |
|
|
J |
|
, |
|||||
|
|
|
M |
|
|
|
|||||||||
|
|
( Re) |
|
|
(Ф) |
|
|
|
2 |
|
|
|
|
|
|
M |
Ox |
|
M |
Ox |
|
yz |
|
|
|
|
xz |
|
, |
||
|
( Re) |
(Ф) |
J |
|
2 |
J |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Oy |
|
|
|
Oy |
|
|
xz |
|
|
|
|
yz |
|
|
(7.17)
|
|
(Re) |
(P e) |
(Ф) |
Q MC Jz . (7.18) |
|
|
MOz |
MOz |
MOz |
|
хс и yc – координаты центра масс ротора с. |
|
|
|||
R |
e |
= 0 будет выполнено при любых |
и в том и только том случае, если |
||
|
|||||
|
|
xc = yc = 0 , |
(7.19) |
||
. При выполнении этого условия ротор называется статически уравновешен-
ным.
Жесткий ротор не создает динамических моментов относительно осей Oх
и Oy при любых и в том и только том случае, если |
|
Jxz = Jyz = 0, |
(7.20) |
т.е. если ось z является главной осью инерции ротора. При выполнении условий (7.19) и (7.20), т.е. если ось вращения является главной центральной осью инер-
ции, ротор называется динамически уравновешенным.
|
Сравнивая |
(7.18) с уравнением движения |
вращающегося ротора |
|||
J |
Q M |
C |
, |
легко заметить, что при любом законе движения M (Re) 0 . |
||
z |
|
|
|
|
0 z |
|
|
МC, Q – внутренние силы. |
|
|
|||
|
|
|
|
(Re) |
Jz . |
(7.21) |
|
|
|
|
MOz |
||
M0(Re)z 0 только при равномерном вращении ротора.
186
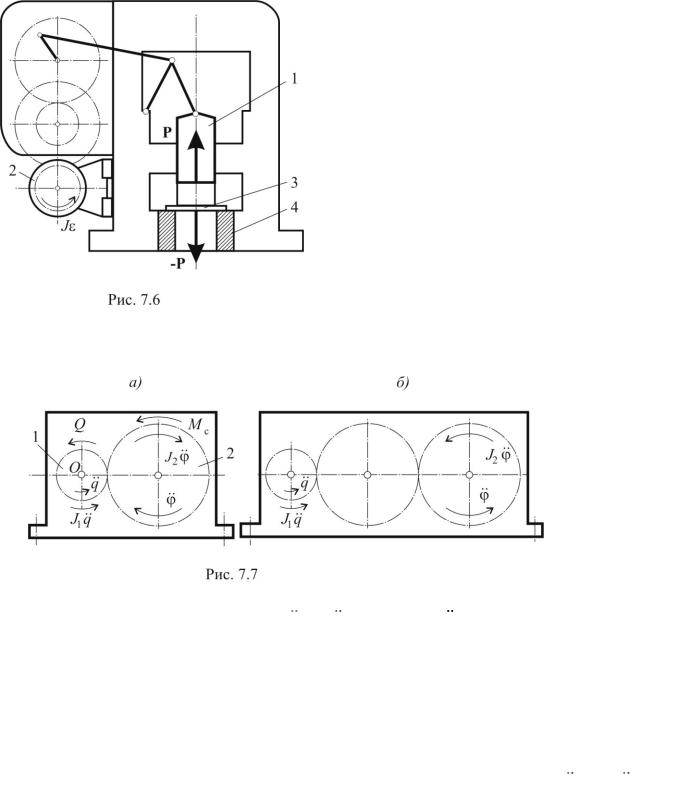
Пример. Схема вырубного пресса.
Силы |
P |
и |
P |
внутренние, на основа- |
ние они не действуют.
Однако в момент удара происходит резкое уменьшение скорости пуансона.
Возникает переменный инерционный момент J , воздействующий на основание пресса.
Частота этого воздействия определяется числом циклов машины в единицу времени.
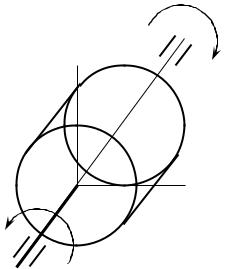
Схема двухроторной машины.
Q и MС |
являются внутренними для машины обобщенными силами. |
|||||||||
|
|
|
M |
(Re) |
J q J |
(J |
J i |
1 |
)q, |
|
|
|
|
0z |
|
||||||
|
|
|
|
1 |
2 |
1 |
2 |
|
|
|
i – передаточное отношение. |
|
|
|
|
|
|||||
При J1 |
J2i |
1 |
машина является полностью уравновешенной. |
|||||||
|
||||||||||
Уравновешенность нарушается, если одна из активных обобщенных сил становится внешней.
В двухроторной машине, схема которой показана на рис. 7.7, б, оба ротора
вращаются в одном направлении; поэтому инерционные моменты |
J q |
и |
J |
2 |
в |
|
1 |
|
|
|
этом случае складываются, и при ускоренном движении уравновешенность не может быть достигнута.
187
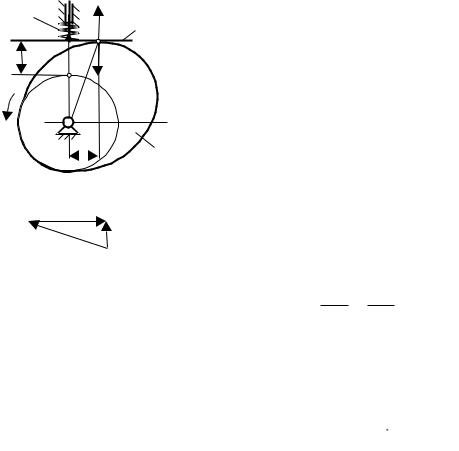
7.5.Уравновешивание роторов
Всовременных машинах угловые скорости роторов достигают 10000 с-1 и более, а скорости порядка 300 – 600 с-1 являются обычными.
Смещение центра масс ротора относительно оси вращения на 1 мм при угловой скорости в 1000 с-1 создает динамическую нагрузку на опоры, в 100 раз превышающую силу тяжести ротора..
Операцию уравновешивания роторов часто называют балансировкой, а устройства, на которых осуществляется балансировка, – балансировочными станками.
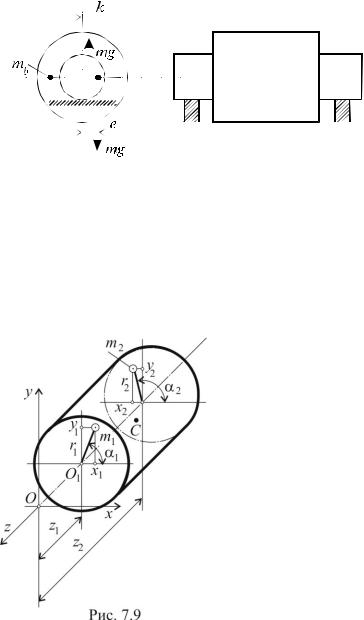
Уравновешивание жесткого ротора.
|
При статической баланси- |
|
|
ровке жесткого ротора добива- |
|
|
ются выполнения условий |
|
|
xc = yc = 0 . |
(7.19) |
|
Установкой |
балансировоч- |
|
ного груза mb |
выводят центр |
|
масс ротора на ось вращения. |
|
|
Ротор, установленный в лю- |
|
Рис. 7.8 |
бое начальное, не катится по |
|
призматическим опорам. |
||
|
|
|
Точность статической балансировки зависит от коэффициента трения качения k цапф ротора по призмам. Качение произойдет, если
mge> mgk.
Неуравновешенность не будет обнаруживаться, если e k; остаточная несбалансированность ротора определяется моментом массы: me mk.
Динамическая балансировка ротора, добиваются
выполнение условий (7.19) и |
|
Jxz = Jyz = 0, |
(7.20) |
Для этого потребуется две балансировочные массы, устанавливаемыми в двух произвольно выбранных плоскостях, перпендикулярных оси вращения и называемых плоскостями исправления.
z1 и z2 – координаты плоскостей исправления, m1 и m2 – массы балансировочных грузов,
x1, y1, x2, y2 – их координаты в плоскостях исправления (система Oxyz связана с ротором);
m – масса ротора,
xc, yc – координаты его центра масс.
188

Тогда условия (7.19) будут выполнены, если
|
m x |
m x |
|
mx |
0; |
|
|||||||
|
|
1 |
1 |
2 2 |
c |
|
|
|
|
|
|
(7.22) |
|
|
m y |
m y |
|
my |
|
|
0. |
||||||
|
2 |
|
|
||||||||||
|
|
1 |
1 |
2 |
c |
|
|
|
|
|
|
|
|
Условия (7.20) будут выполнены, если |
|
|
|
|
|
|
|
||||||
J |
J |
xz |
m x z m x z |
2 |
|
0; |
|
||||||
xz |
|
|
1 1 1 |
2 2 |
|
|
|
(7.23) |
|||||
J |
J |
|
m y z m y |
|
z |
|
|
0. |
|||||
yz |
2 |
2 |
|
||||||||||
yz |
|
|
1 1 1 |
2 |
|
|
|
|
|||||
Число неизвестных (массы грузов m1, m2 и их координаты x1, y1, x2, y2 ) превышает число уравнений, нужно дополнительно задать два условия, в качестве
которых можно выбрать значения радиусов r1 
 x12 y12 и r2
x12 y12 и r2 
 x22 y22 , и искать углы 1, 2, и значения m1, m2.
x22 y22 , и искать углы 1, 2, и значения m1, m2.
7.6. Виброактивность плоского механизма
При анализе внешней виброактивности плоского механизма часто ограничиваются определением составляющих главного вектора и главного момента внешних реакций, лежащих в
плоскости движения (
R |
(e) |
, |
|
||
x |
|
|
R |
(e) |
, |
|
y |
|||
|
|
M (Re)
Oz
).
Для каждого положения механизма может быть найдена прямая r-r, параллельная вектору
R |
(e) |
, |
|
являющаяся линией действия равнодей-
ствующей всех внешних реакций
R(e)
. Ее поло-
жение определяется из условия
M |
(Re) |
R |
(e) |
h M |
(Re) |
0, |
O r |
|
Oz |
||||
|
|
|
|
|
(7.24)
Уравновешивание плоского механизма. Пусть все активные силы (кроме сил тяжести, влияние которых здесь учитываться не будет) являются внутренними для машины в целом. Тогда
R |
(e) |
Ф mw |
, |
|
|
|
|
|
|
c |
|
где wc – вектор абсолютного ускорения центра масс механизма. Первое из условий уравновешенности R(e) 0 выполняется, если
т.е. если vc const . Дя стационарной машины скорость vc =0.
(7.25)
wc 0,
189
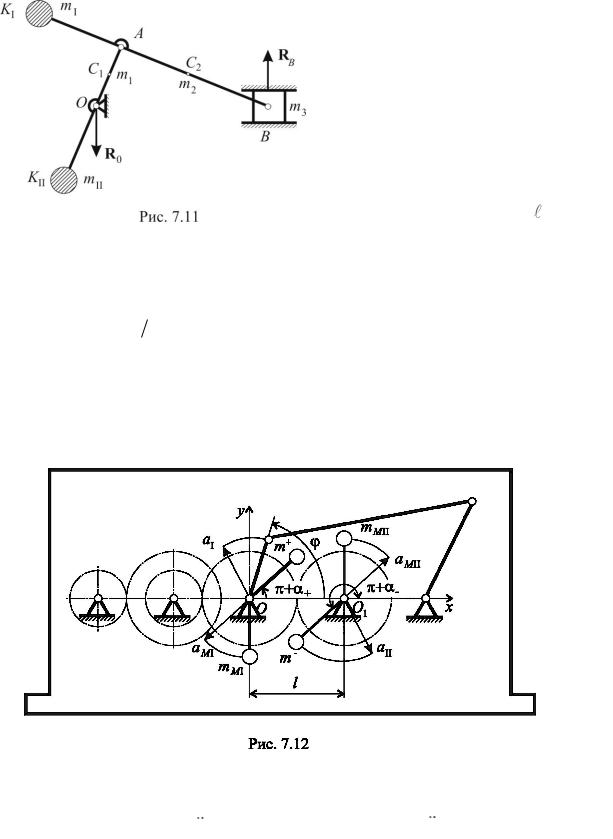
Установка противовесов на звеньях механизма.
С1 и С2 – центры масс кривошипа и шатуна;
К1 и К2 – центры масс противовесов;
В – центр масс ползуна;
m1, m2, m3 – массы этих звеньев;
ОА = r, АВ = ℓ, АС2 = а2, АК1 = аI, ОК2= аII, ОС1 = а1.
Мсса mI первого противовеса:
|
|
|
|
|
|
|
|
m a m a |
m , |
|
|
|
|
|
|
|
|
|
I I |
2 2 |
3 |
Перенесем центр масс системы в точку O: |
|
|
|
|
||||||
m |
II |
a |
II |
m a |
m |
I |
m |
m r |
|
|
|
|
1 1 |
|
2 |
3 |
|
|
|||
Недостатком является очень большая суммарная масса противовесов. |
||||||||||
При aI a2 2 из первого условия получим mI |
= m2 |
+ 2m3. Если |
||||||||
aII aI r / 2 , то второе условие дает: mII=m1 + 4m2 + 6m3. |
|
|||||||||
же
Не будет выполнено условие уравновешивания:
M |
( Re) |
0; |
|
Oz |
|||
|
|
момент
M ( Re)
Oz
будет создаваться внешними реакциями
RO
и
R B
.
Уравновешивание первых гармоник сил инерции.
Полагая, что активные силы для машины являются внутренними, имеем
R |
(e) |
Ф |
|
mx m |
x ( ), |
|
|
|
2 |
|
|
x |
|
x |
c |
c |
|
(e) |
2 |
|
( ). |
Ry |
Фy myc m |
yc |
Здесь xc( ) и yc( ) – координаты центра масс механизма.
190