

Экзамен / тмм - экзамен(и задачи) / ТММ / tmm_17
.doc
7.7. Потери энергии на трение в цикловом механизме
Движение циклового механизма сопровождается не только возникновением переменных сил, приводящим к его внутренней и внешней виброактивности; в движущемся механизме происходят также процессы, связанные с преобразованием энергии.
Основным энергетическим процессом, происходящим в механизме, является преобразование работы движущих сил в работу сил полезного сопротивления, возникающих при выполнении рабочего процесса. Вместе с тем работа движущих сил переходит в механизме в кинетическую энергию его подвижных звеньев, потенциальную энергию действующих на звенья механизма потенциальных сил ( силы тяжести, силы упругости в упругих элементах), а также в работу сил трения, возникающих в кинематических парах. При установившемся движении циклового механизма изменение кинетической и потенциальной энергии за цикл оказывается равным нулю, поскольку в начале и конце цикла координаты и скорости всех материальных точек одинаковы. Поэтому баланс работ за цикл может быть записан для механизма в следующей форме:
![]() ,
(7.27)
,
(7.27)
где АДС – работа движущих сил, АПС – работа сил полезного сопротивления, АТР – работа сил трения, характеризующая потери энергии в механизме. Работа сил трения, преобразующаяся в тепловую энергию, приводит к нагреву контактирующих элементов кинематических пар, что вызывает увеличение интенсивности износа и снижение долговечности механизма. Расходы энергии на трение ухудшают экономические показатели работы машины.
В связи с этим потери на трение, возникающие в механизме при выполнении заданного рабочего процесса, должны рассматриваться как одна из важных динамических характеристик, определяющих наряду с внешней и внутренней виброактивностью качество механической системы машины.
П осле
проведения кинематического и силового
анализа и определения сил трения в
кинематических парах вычисление потерь
энергии в механизме не вызывает
затруднений. Рассмотрим в качестве
примера кривошипно-ползунный механизм,
показанный на рис.7.13. Предположим, что
в некотором положении механизма,
определяемом обобщенной координатой
q, найдены величины
силы трения F в
поступательной паре и моменты сил трения
осле
проведения кинематического и силового
анализа и определения сил трения в
кинематических парах вычисление потерь
энергии в механизме не вызывает
затруднений. Рассмотрим в качестве
примера кривошипно-ползунный механизм,
показанный на рис.7.13. Предположим, что
в некотором положении механизма,
определяемом обобщенной координатой
q, найдены величины
силы трения F в
поступательной паре и моменты сил трения
![]() во вращательных парах. Тогда, зная
скорость движения ползуна
во вращательных парах. Тогда, зная
скорость движения ползуна
![]() и относительные угловые скорости
и относительные угловые скорости
![]() во вращательных парах 0, А, В, можно
определить мощность сил трения
во вращательных парах 0, А, В, можно
определить мощность сил трения
![]() (7.28)
(7.28)
Работа
сил трения за цикл при равномерном
вращении входного звена с угловой
скоростью
![]() определяется интегрированием этого
выражения
определяется интегрированием этого
выражения

Учитывая, что


получаем
 (7.29)
(7.29)
Для приближенного вычисления этого интеграла определяются значения сил и моментов сил трения, а также геометрических передаточных функций механизма d / dq, d / dq, dxB / dq в k дискретных положениях: q = 2s/k (s=0,…,k-1). Далее вычисляется приближенное значение по формуле
 (7.30)
(7.30)
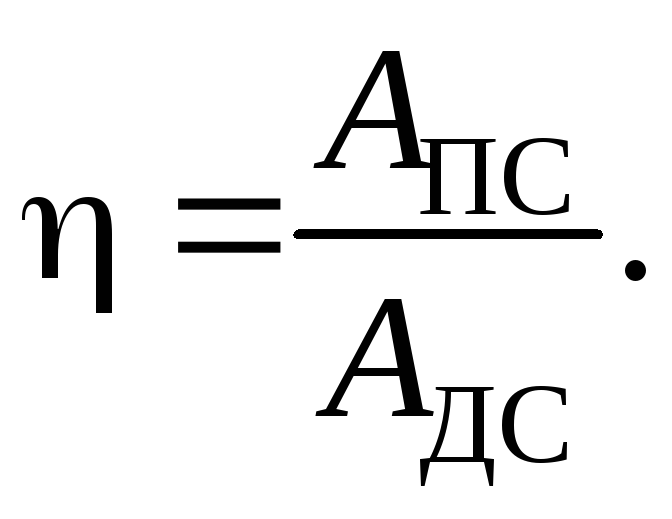
Качество механизма может характеризоваться и таким параметром, как коэффициент полезного действия (КПД). Коэффициентом полезного действия циклового механизма при установившемся движении называется отношение работы сил полезного сопротивления за цикл к работе движущих сил:
 (7.31)
(7.31)
Для передаточных механизмов с линейной функцией положения КПД может быть определен как отношение мощности полезных сил сопротивления к мощности движущих сил. Величина
1 , (7.32)
равная, в силу выражения (7.27), отношению потерь на трение к работе движущих сил, называется коэффициентом потерь.
Напомним, что реакции в кинематических парах, а следовательно, и возникающие в них силы трения, зависят как от активных сил полезного сопротивления, так и от сил инерции. Силы инерции в свою очередь определяются законами движения звеньев. Поэтому КПД и коэффициент потерь зависят не только от качества механизма, свойств его кинематических пар, коэффициентов трения в них, но и от режима работы, законов программного движения, рабочей нагрузки. Так, при полном отсутствии полезной нагрузки (АПС = 0) силы инерции звеньев механизма будут вызывать реакции в кинематических парах, а следовательно, и силы трения. В этом режиме всегда 0, 1. С увеличением полезной нагрузки при фиксированном законе движения входного звена КПД механизма будет возрастать, поскольку потери на трение будут увеличиваться медленнее, чем работа сил полезного сопротивления.
Чтобы исключить влияние инерционных сил на КПД, можно пользоваться условной расчетной моделью механизма, учитывающей только действие движущих сил и сил полезного сопротивления. В этой модели принимается, что массы всех звеньев равны нулю.
Силы трения, рассчитанные по такой модели, будут в каждом положении механизма пропорциональными полезной нагрузке, и КПД будет характеризовать только свойства кинематических пар.
Для увеличения КПД и уменьшения потерь на трение при конструировании механизмов используются различные методы. Наибольший эффект дает уменьшение коэффициентов трения в кинематических парах. Это достигается применением опор качения вместо опор скольжения, использованием смазки в кинематических парах и т.п.
Глава 8. Динамика машин с жесткими звеньями
8.1. Механические характеристики двигателя
П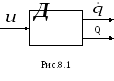 ри
решении задач динамики машин обычно
используют наиболее простые динамические
модели двигателей, отражающие зависимости
между законами изменения во времени
входного параметра двигателя (управления)
u(t) , обобщенной координаты выходного
звена q(t) и обобщенной движущей силы
Q(t) (рис.8.1). Математические соотношения,
описывающие эти зависимости, называются
механическими характеристиками
двигателей. К более сложным моделям,
учитывающим динамику внутренних
физических процессов, происходящих в
двигателях, приходится обращаться
сравнительно редко; в этом курсе такие
модели рассматриваться не будут.
ри
решении задач динамики машин обычно
используют наиболее простые динамические
модели двигателей, отражающие зависимости
между законами изменения во времени
входного параметра двигателя (управления)
u(t) , обобщенной координаты выходного
звена q(t) и обобщенной движущей силы
Q(t) (рис.8.1). Математические соотношения,
описывающие эти зависимости, называются
механическими характеристиками
двигателей. К более сложным моделям,
учитывающим динамику внутренних
физических процессов, происходящих в
двигателях, приходится обращаться
сравнительно редко; в этом курсе такие
модели рассматриваться не будут.
 С
основными разновидностями механических
характеристик познакомимся на примере
электродвигателя постоянного тока с
независимым возбуждением, принципиальная
схема которого показана на рис.8.2. Здесь
вращение выходного звена двигателя
(ротора) происходит за счет взаимодействия
тока, возникающего в обмотке ротора, с
магнитным полем, создаваемым обмоткой
возбуждения . При вращении ротора в его
обмотке в соответствии с законом
электромагнитной индукции возникает
обратная электродвижущая сила Е
(ЭДС) , пропорциональная величине
магнитного потока обмотки возбуждения
Ф и угловой скорости ротора
С
основными разновидностями механических
характеристик познакомимся на примере
электродвигателя постоянного тока с
независимым возбуждением, принципиальная
схема которого показана на рис.8.2. Здесь
вращение выходного звена двигателя
(ротора) происходит за счет взаимодействия
тока, возникающего в обмотке ротора, с
магнитным полем, создаваемым обмоткой
возбуждения . При вращении ротора в его
обмотке в соответствии с законом
электромагнитной индукции возникает
обратная электродвижущая сила Е
(ЭДС) , пропорциональная величине
магнитного потока обмотки возбуждения
Ф и угловой скорости ротора
![]() :
:
![]() ,
,
где
![]() – некоторый коэффициент пропорциональности.
В цепи ротора при прохождении тока I
возникают потери напряжения, связанные
с наличием активного сопротивления R
и индуктивности L . С учетом потерь
уравнение электрической цепи записывается
в форме
– некоторый коэффициент пропорциональности.
В цепи ротора при прохождении тока I
возникают потери напряжения, связанные
с наличием активного сопротивления R
и индуктивности L . С учетом потерь
уравнение электрической цепи записывается
в форме
![]() .
(8.1)
.
(8.1)
С другой стороны, в соответствии с законом Ампера движущий момент Q связан с силой тока I соотношением
![]() .
(8.2)
.
(8.2)
Исключая I из (8.1) и (8.2), получаем
 . (8.3)
. (8.3)
Обозначив
![]() ,
,
![]() ,
,
![]() , легко преобразовать это выpажeниe к
виду
, легко преобразовать это выpажeниe к
виду
![]() . (8.4)
. (8.4)
Соотношение
(8.4) , связывающее входной (![]() )
и выходные (
)
и выходные (![]() )
параметры двигателя, называется
динамической характеристикой.
Параметр
)
параметры двигателя, называется
динамической характеристикой.
Параметр
![]() называется электромагнитной постоянной
времени и характеризует инерционность
электромагнитных процессов, происходящих
в двигателе. Обычно величина его лежит
в пределах от 0,02 до 0,1 с. Параметр
называется электромагнитной постоянной
времени и характеризует инерционность
электромагнитных процессов, происходящих
в двигателе. Обычно величина его лежит
в пределах от 0,02 до 0,1 с. Параметр
![]() называется крутизной характеристики
двигателя. Чем больше крутизна
называется крутизной характеристики
двигателя. Чем больше крутизна
![]() ,
тем слабее изменение нагрузки влияет
на величину угловой скорости ротора .
,
тем слабее изменение нагрузки влияет
на величину угловой скорости ротора .
Характеристика
(8.4) широко используется при анализе
динамических процессов, происходящих
в машинах, приводимых в движение
электродвигателями постоянного тока
с независимым возбуждением. Если
исследуется статический процесс, при
котором
![]() ,
выражение (8.4) упрощается и переходит в
статическую характеристику двигателя:
,
выражение (8.4) упрощается и переходит в
статическую характеристику двигателя:
![]() .
.
Статическая
характеристика может использоваться
и для исследования таких динамических
процессов , при которых
![]() ,
то есть в тех случаях , когда малой
является либо постоянная времени
,
то есть в тех случаях , когда малой
является либо постоянная времени
![]() ,
либо производная
,
либо производная
![]() .
.
Н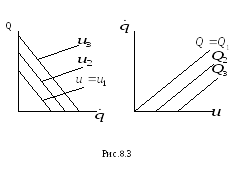 а
рис.8.3 построены два семейства статических
характеристик: на рис.8.3,а изображены
рабочие характеристики, выражающие
зависимости
а
рис.8.3 построены два семейства статических
характеристик: на рис.8.3,а изображены
рабочие характеристики, выражающие
зависимости
![]() при различных постоянных значениях
при различных постоянных значениях
![]() ;
на рис.8.3,б представлены регулировочные
характеристики
;
на рис.8.3,б представлены регулировочные
характеристики
![]() ,
построенные для различных постоянных
значений
,
построенные для различных постоянных
значений
![]() .
В рассматриваемом случае все эти
характеристики являются линейными.
.
В рассматриваемом случае все эти
характеристики являются линейными.
Регулировочная
характеристика, соответствующая Q
= 0 ( то есть определяющая зависимость
при отсутствии нагрузки на двигатель),
называется характеристикой холостого
хода. При определенных условиях эта
характеристика может рассматриваться
как приближенная и при
![]() .
Это имеет место в тех случаях, когда
статическая характеристика двигателя
является достаточно жесткой, то
есть когда крутизна s достаточно
велика, так что влиянием нагрузки на
скорость можно в первом приближении
пренебречь. Характеристика. полученная
при таком предположении, называется
идеальной кинематической характеристикой;
она может быть приведена к виду
.
Это имеет место в тех случаях, когда
статическая характеристика двигателя
является достаточно жесткой, то
есть когда крутизна s достаточно
велика, так что влиянием нагрузки на
скорость можно в первом приближении
пренебречь. Характеристика. полученная
при таком предположении, называется
идеальной кинематической характеристикой;
она может быть приведена к виду
![]() . (8.5)
. (8.5)
В соответствии с этой характеристикой угловая скорость ротора полностью определяется значением входного параметра двигателя: при ее использовании двигатель становится как бы "источником скорости”.
Общий
вид механических характеристик
двигателей. В общем случае механические
характеристики различных двигателей
(тепловых, гидравлических, пневматических)
могут быть представлены в форме,
аналогичной полученным выше. На холостом
ходу , при
![]() ,
поведение двигателя характеризуется
идеальной кинематической характеристикой
,
поведение двигателя характеризуется
идеальной кинематической характеристикой
![]() , (8.6)
, (8.6)
которая в общем случае может быть нелинейной. С помощью такой характеристики приближенно описываются свойства двигателей, у которых скорость в статических режимах слабо зависит от нагрузки. Кроме рассмотренных выше электродвигателей такими свойствами обладают гидравлические двигатели с объемным и дроссельным управлением. В тепловых двигателях внутреннего сгорания и в пневматических двигателях наблюдается обратное: значение входного параметра u в значительной мере предопределяют величину обобщенной силы. Статические режимы в таких двигателях могут приближенно описываться идеальной силовой характеристикой
![]() . (8.7)
. (8.7)
В общем случае при исследовании статических режимов используются статические характеристики вида
![]() . (8.8)
. (8.8)
Они могут быть представлены в форме, разрешенной относительно Q:
![]() . (8.9)
. (8.9)
Эти
характеристики учитывают влияние
нагрузки на обобщенную скорость, которое
в большей или меньшей степени проявляется
у всех реальных двигателей. Регулировочные
характеристики, получающиеся из (8.8) при
Q=const,
и рабочие характеристики, получающиеся
из (8.9) при u=const,
вообще говоря, являются нелинейными.
Как правило с ростом нагрузки обобщенная
скорость
![]() уменьшается, и рабочие характеристики
оказываются “падающими”. Величина
производной
уменьшается, и рабочие характеристики
оказываются “падающими”. Величина
производной
![]() ,
взятая с обратным знаком
,
взятая с обратным знаком
![]()
 , (8.10)
, (8.10)
называется крутизной
статической характеристики в
данной точке; для падающей характеристики
![]() .
Если обобщенная скорость слабо зависит
от нагрузки, статическая характеристика
двигателя называется жесткой; если
же изменение скорости слабо влияет на
величину момента, характеристика
является мягкой.
.
Если обобщенная скорость слабо зависит
от нагрузки, статическая характеристика
двигателя называется жесткой; если
же изменение скорости слабо влияет на
величину момента, характеристика
является мягкой.
В
некоторых задачах динамики машин
значения
![]() и
и
![]() могут считаться близкими к некоторым
средним значениям
могут считаться близкими к некоторым
средним значениям
![]() и
и
![]() .
В этих случаях линейная статическая
характеристика может быть линеаризована
в окрестности точки (
.
В этих случаях линейная статическая
характеристика может быть линеаризована
в окрестности точки (![]() ,
,![]() ):
):
 . (8.11)
. (8.11)
Статические характеристики
адекватно отражают свойства реальных
двигателей только при статических
режимах работы машины, то есть в тех
случаях, когда параметры
![]() постоянны или изменяются незначительно
и достаточно медленно. В более общем
случае приходится учитывать инерционность
физических процессов, происходящих в
двигателе. В электрическом двигателе
постоянного тока такая инерционность
связана с индуктивностью цепи якоря;
она приводит к тому, что изменение
входного напряжения не сразу влечет за
собой изменение тока в цепи ротора;
происходит переходный процесс,
продолжительность которого зависит от
постоянной времени
постоянны или изменяются незначительно
и достаточно медленно. В более общем
случае приходится учитывать инерционность
физических процессов, происходящих в
двигателе. В электрическом двигателе
постоянного тока такая инерционность
связана с индуктивностью цепи якоря;
она приводит к тому, что изменение
входного напряжения не сразу влечет за
собой изменение тока в цепи ротора;
происходит переходный процесс,
продолжительность которого зависит от
постоянной времени
![]() .
.
В
двигателях других типов у инерционности
иная физическая природа. В гидравлическом
двигателе она обусловлена сжимаемостью
жидкости. Однако во всех случаях она
приводит к тому, что обобщенная скорость
выходного звена зависит не только от
нагрузки, но и от ее производных по
времени. В первом приближении это можно
учесть введением в статическую
характеристику (8.9) первой производной
от
![]() и представлением ее в форме
и представлением ее в форме
![]() . (8.12)
. (8.12)
Параметр
![]() называется в общем случае собственной
постоянной времени двигателя, а
выражение (8.12) – его динамической
характеристикой. Необходимо отметить,
что для некоторых классов двигателей
характеристика вида (8.12) может
использоваться только в тех случаях,
когда
называется в общем случае собственной
постоянной времени двигателя, а
выражение (8.12) – его динамической
характеристикой. Необходимо отметить,
что для некоторых классов двигателей
характеристика вида (8.12) может
использоваться только в тех случаях,
когда
![]() изменяется в сравнительно узких пределах,
а для исследования других динамических
режимов необходимо пользоваться более
сложными динамическими моделями, которые
в этом курсе не рассматриваются.
изменяется в сравнительно узких пределах,
а для исследования других динамических
режимов необходимо пользоваться более
сложными динамическими моделями, которые
в этом курсе не рассматриваются.