

Малые колебания / Задача
.PDFЗадача
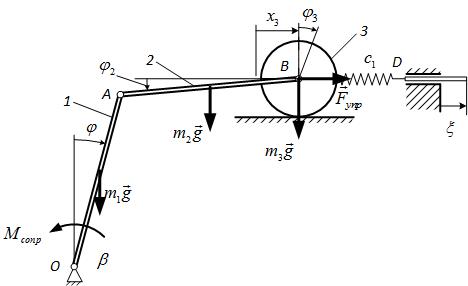
Система состоит из кривошипа 1, шатуна 2, однородного цилиндра 3, катящего без скольжения по плоскости и пружины BD жѐсткости c1 (рис. 1).
Конец пружины прикреплѐн к штоку, который перемещается по законуe sin p t . Кривошип и шатун являются однородными стержнями одинаковой длинны l . При вертикальном положении стержня OA и 0
пружина BD не напряжена. При t 0 угол отклонения и скорость отклонения стержня 1 от устойчивого положения 0 равны 0 и 0 соответственно.
На кривошип 1 действует момент сопротивления Mсопр
Рис. 1
Дано: m1 m2 |
1, 2 кг ; |
m3 1,6 кг ; l 0,3 м ; c1 840 |
Н / м ; 7, 2 |
Н м с ; |
|||
|
0 |
0,1 рад ; |
|
0,05 |
с 1 ; g 10 м / с2 ; e 0,03 м ; |
p 10 с 1 . |
|
|
|
0 |
|
|
|
|
|
Определить вынужденные колебания стержня.
Решение:
Составим расчѐтную схему согласно заданным параметрам (рис. 2). Система имеет одну степень свободы. В качестве обобщѐнной координаты
выберем угол поворота стержня 1 (положительное направление по часовой стрелке). Введѐм горизонтальную координату центра тяжести (точки B) цилиндра 3 - x3 (от равновесного положения) и угол поворота цилиндра 3 -
3 , а так же угол поворота стержня 2 - 2 . В положении равновесия имеем
0 , x3 0 , 3 0 , 0 .
Обозначим все учитываемые силы и моменты в системе:
|
|
|
|
- силы тяжести m1g |
, m2 g |
, m3 g |
; |
- сила упругости пружины Fупр ; - момент сопротивления Mсопр .
Рис. 2
Предварительно определим геометрические и кинематические зависимости в системе, предполагая, что отклонения стержня 1 от положения равновесия невелики.
Имеем геометрические связи:
x3 |
l l sin l cos 2 ; |
|
(1) |
l l cos l sin 2 ; |
|
Дифференцируя по времени: |
|
x3 |
l cos l sin 2 2 ; |
0 l sin l cos 2 2 ;
(2)
Учитывая малые отклонения от положения равновесия, при которых имеем приближѐнные равенства sin , sin 2 2 , cos 1 12 2 ,
cos 2 1 |
|
1 |
|
2 |
2 и пренебрегая степенями более второй, из второго |
|||||||||||||||||||||||||||||||||||||||||||||
|
2 |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
уравнения системы (1) получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
sin 2 1 cos 1 |
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
||||||||||||||||||||||||||||||||
2 |
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
x3 l sin l cos 2 l l l |
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
1 |
|
|
|
|
2 |
|
l |
|
(3) |
|||||||||||||||||||||||||||||||||||||||||
2 |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
1 |
|
|
|
|
2 |
2 |
|
|
1 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
l |
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
l |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 |
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Аналогично из (2): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
2 |
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
cos 2 |
1 |
1 |
2 |
2 |
|
|
|
|
|
1 |
|
1 |
|
|
|
|
2 2 |
|
1 |
1 |
4 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
l 2 2 |
l 1 |
2 |
; |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
x3 |
l 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
, имеем скоростей: |
|
||||||||||||
Пренебрегая произведениями и |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
2 |
0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
|
x3 |
l ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для модуля скорости центра тяжести стержня 2, рассматривая его движение как вращение относительно движущейся точки B и учитывая (4), имеем:
|
2 |
l |
2 |
|
|
||
V2 |
x3 |
|
|
2 |
x3 l |
(5) |
|
2 |
|||||||
|
|
|
|
|
|
||
Учитывая (4) (угловая скорость стержня приблизительно равна нулю), движение стержня 2 можно приближѐнно рассматривать как поступательное со скоростью (5).
Цилиндр 3 совершает сложное движение, при котором скорость точки касания его с поверхностью равна нулю.

Таким образом, точка касания с поверхностью является мгновенным центром скоростей для цилиндра. Учитывая это, скорость центра колеса равна:
x3 r 3
Откуда, учитывая (4), угловая скорость цилиндра 3:
|
|
1 |
|
|
l |
|
(6) |
|
|
||||||
3 |
r |
x3 |
r |
|
|||
|
|
|
|
|
|
Далее, для решения задачи составим уравнение Лагранжа второго рода, которое в нашем случае, учитывая, что на систему действуют консервативные силы (сила тяжести), диссипативные силы (момент сопротивления) и возмущающая сила (сила упругости), имеет вид:
|
d |
T |
|
T |
|
|
|
|
QF |
|
|
|
|
|
|
|
|
|
(7) |
||||
|
|
||||||||||
|
dt |
|
|
|
|
|
|
||||
Где T T1 T2 T3 |
- кинетическая энергия системы; - функция рассеяния |
||||||||||
системы (диссипативная функция Релея); QF - обобщѐнная возмущающая сила.
Кинетическая энергия стержня 1 при вращении вокруг неподвижной оси равна:
T1 12 JO 2
Где момент инерции стержня относительно оси точки O равен:
J |
|
|
|
1 |
|
m l2 |
|
|
|
|
|
|
|
|
|
|
|
(8) |
|||||
O |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
3 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Таким образом, получаем: |
|
|
|
|
|||||||||||||||||||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
2 |
|
|
2 |
|
1 |
|
2 |
|
2 |
|
|
T1 |
|
|
|
|
|
|
m1 |
l |
|
|
|
|
|
l |
|
|
(9) |
||||||
2 |
3 |
|
|
|
6 |
|
m1 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||

Кинетическая энергия стержня 2, движущегося приблизительно поступательно, учитывая (5), равна:
|
|
1 |
2 |
|
1 |
|
|
2 |
|
1 |
|
2 |
|
2 |
|
T2 |
|
|
m2 V2 |
|
|
|
|
|
l |
|
|
(9) |
|||
2 |
2 |
m2 l |
|
2 |
|
m2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинетическая энергия цилиндра 3, совершающего сложное плоскопараллельное движение, равна:
T3 12 m3 x32 12 J3 32
Момент инерции цилиндра 3 относительно центра тяжести как однородного цилиндра равен:
J |
|
|
1 |
r2 m |
(10) |
3 |
|
||||
|
|
2 |
3 |
|
|
|
|
|
|
|
Таким образом, кинетическая энергия, учитывая (4), (6), (10):
|
|
1 |
|
|
2 |
|
1 |
|
1 |
|
2 |
|
l |
|
2 |
|
3 |
|
2 |
|
2 |
|
|
T3 |
|
|
|
|
|
|
|
r |
|
m3 |
|
|
|
|
|
l |
|
|
(11) |
||||
2 |
m3 l |
|
2 |
2 |
|
|
4 |
|
m3 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|||||
Кинетическая энергия системы:
T |
|
1 |
l2 m 2 |
|
1 |
l2 |
m 2 |
|
3 |
l2 m 2 |
|
||||||||
|
|
|
|
||||||||||||||||
|
|
|
6 |
|
|
|
|
1 |
2 |
|
|
2 |
|
|
4 |
3 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(12) |
|||||
|
1 |
|
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
|
|||
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
||||||
|
|
|
l |
|
|
|
|
m1 m2 |
|
m3 |
|
|
|
|
|||||
2 |
|
|
|
2 |
|
|
|
|
|||||||||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||
Найдѐм производные от кинетической энергии, входящие в уравнение (7):
d |
T |
|
2 |
|
1 |
|
|
|
|
|
|
|
|
l |
|
|
|
|
m1 |
m2 |
|
|
|
3 |
||||||||
dt |
|
|
|
|
|
|
|
|||
3 |
m3 |
|
|
T |
0 |
(13) |
|
|
|
||||
2 |
; |
|
||||
|
|
|
|
|
Потенциальную энергию системы определим, как работу сил тяжести перемещению системы из некоторого положения в нулевое (положение равновесия).

Потенциальная энергия системы, учитывая (3), равна:
m1 g |
l |
|
1 cos m2 |
g |
l |
sin 2 |
|||||||||||
|
|
|
|||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
(14) |
||
|
|
l |
|
|
1 |
|
|
l |
|
1 |
|
|
|
|
l |
||
m1 |
g |
|
2 m2 |
g |
|
|
2 |
m1 m2 g 2 |
|||||||||
|
2 |
|
2 |
|
|
||||||||||||
|
2 |
|
|
2 |
|
|
|
|
4 |
|
|||||||
Найдѐм производную потенциальной энергии, входящую в уравнение (7):
|
l |
m m |
g |
|
|
||||
|
2 |
1 |
2 |
|
|
|
|
||
Функция рассеяния системы, равна:
12 2
Производная функции рассеяния:
Обобщѐнная вынуждающая сила, учитывая растяжение пружины равна:
QF |
Fупр |
|
x3 |
c1 |
x3 |
|
l |
l c1 e sin p t l |
|
|
|||||||
|
|
|
|
|
|
|
||
Таким образом, подставляя (13), (15), (17) и (18) в (7), получаем:
(15)
(16)
(17)
x3 ,
(18)
|
2 |
1 |
|
|
3 |
|
|
|
|
2 |
|
|
l |
|
|
|
|
||
l |
|
|
|
|
m1 m2 |
|
|
m3 |
|
|
c1 |
|
|
m1 |
m2 |
g |
|
||
|
2 |
l |
|
2 |
|||||||||||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
l c1 |
e sin p t |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Это уравнение является уравнением вынужденных колебаний системы с линейным сопротивлением.
В каноническом виде: |
|
|||
2 n k |
|
h sin p t |
(19) |
|
|
|
2 |
|
|

Где
- коэффициент затухания:
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7,2 |
|
|
|
10 |
с 1 |
(20) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
1 |
|
|
3 |
|
|
|||||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||
|
2 l |
|
|
|
|
m1 |
m2 |
|
|
m3 |
|
|
2 0,3 |
|
|
|
1,2 1,2 |
|
1,6 |
|
|
|
|
|
3 |
2 |
|
|
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||||||
- круговая частота без учѐта сопротивления:
|
|
l c |
1 |
|
m m |
g |
|
|
|
0,3 840 |
1 |
1,2 1,2 10 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
k |
|
|
|
1 |
2 |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
14,142 с 1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(21) |
||||||||||
|
|
1 |
|
|
|
|
3 |
|
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
l |
|
|
m1 |
m2 |
|
|
|
m3 |
|
|
|
|
0,3 |
|
|
|
1,2 1,2 |
|
|
1,6 |
|
|
|
|
|
||||||||||
|
3 |
2 |
|
|
|
3 |
2 |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
- относительная амплитуда возмущающей силы: |
|
|
|
|
|
||||||||||||||||||||||||||||||||
h |
|
|
|
|
|
|
|
|
c1 e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
840 0,03 |
|
|
|
|
|
|
21 с 2 |
(22) |
||||
|
1 |
|
|
|
|
|
|
3 |
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
l |
|
|
|
m1 |
m2 |
|
|
|
m3 |
|
|
|
0,3 |
|
|
|
|
1, 2 1, 2 |
|
|
|
1,6 |
|
|
|
|||||||||||
|
|
|
|
2 |
|
3 |
2 |
|
|
||||||||||||||||||||||||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Уравнение (19) имеет общее решение, состоящее из общего решения * соответствующего однородного уравнения:
2 n k |
|
0 |
(23) |
|
|
|
2 |
|
|
и частного решения уравнения ** (19).
Таким образом, имеем:
* ** |
(24) |
Характеристическое уравнение для (23) имеет вид: |
|
2 2 n k 2 0 |
(25) |
Откуда корни его равны: |
|
|
n |
n2 k 2 |
1,2 |
|
|
Так как в нашем случае имеем n k , то
1,2 n 
 k2 n2 n k1 i
k2 n2 n k1 i
Где круговая частота собственных колебаний системы равна:
k1 
 k2 n2
k2 n2 
 14,1422 102 10 с 1
14,1422 102 10 с 1
Общее решение однородного уравнения (23) имеет вид:
* e n t C1 cos k1 t C2 sin k1 t
Частное решение уравнения (19) имеет вид:
** A sin p t
Подставляя его в (19), находим значения:
- амплитуды вынужденных колебаний
A |
|
|
|
|
|
h |
|
|
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 4 |
|
|
|
|
|
2 4 102 |
|
|||||||
|
|
p2 |
n2 |
p2 |
102 |
102 |
||||||||||||
|
|
|
k 2 |
|
14,1422 |
|
||||||||||||
0,094 рад
-сдвиг фазы вынужденных колебаний
|
|
|
|
2 n p |
|
|
|
2 10 10 |
|
|
|
|||||
arctg |
|
|
|
|
|
arctg |
|
|
|
|
|
|
1,107 рад |
|||
|
2 |
p |
2 |
14,142 |
2 |
10 |
2 |
|||||||||
|
|
|
k |
|
|
|
|
|
|
|
|
|||||
Получаем общее решение уравнения (19): |
||||||||||||||||
e n t C1 cos k1 t C2 sin k1 t A sin p t |
||||||||||||||||
Производная по времени: |
|
|
|
|
|
|
|
|||||||||
|
e |
n t |
C2 |
k1 n C1 cos k1 t n C2 |
C1 k1 sin k1 t |
|||||||||||
|
|
|||||||||||||||
A p cos p t
(26)
(27)
(28)
(29)
(30)
(31)
(32)
Определяем постоянные интегрирования из начальных условий:
0 |
e n 0 C1 cos k1 0 C2 |
sin k1 0 A sin p 0 |
|
|
|||||||||
C1 |
A sin ; |
|
|
|
|
(33) |
|||||||
|
e |
n 0 |
C2 k1 n C1 cos k1 0 n C2 C1 k1 sin k1 |
0 |
|||||||||
|
|||||||||||||
0 |
|
|
|
||||||||||
A p cos p 0 C2 |
k1 |
n C1 A p cos ; |
|
|
|||||||||
Откуда: |
|
|
|
|
|
|
|||||||
C1 0 |
A sin 0,1 0,094 sin 1,107 0,184 рад; |
|
|
||||||||||
C2 |
1 |
|
|
|
|
|
|
(34) |
|||||
|
|
|
|
|
|
|
|||||||
k |
0 n 0 n A sin A p cos |
|
|||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0,05 10 0,15 10 0,094 sin 1,107 |
|
|
||||||
|
|
|
|
|
|
|
|
|
0,147 рад; |
|
|
||
|
|
|
|
|
|
|
|||||||
10 |
|
|
|
|
|
|
|
||||||
|
0,094 10 cos 1,107 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, получаем искомую зависимость:
e 10 t 0,184 cos 10 t 0,147 sin 10 t 0,094 sin 10 t 1,107
Ответ:
e 10 t 0,184 cos 10 t 0,147 sin 10 t 0,094 sin 10 t 1,107