

Курсач / ПЗ
.doc
1.Введение. 2
Исходные данные. 2
2. Структурный анализ 3
2.1. Задачи структурного анализа механизма 3
2.2.Структурный анализ 3
3. Геометрический анализ механизма 4
3.1. Задачи геометрического анализа 4
3.2 Составление уравнений геометрического анализа 4
3.3 Решение уравнений геометрического анализа 4
3.4. Особые положения структурных групп 6
4. Кинематический анализ 9
4.1.Введение. 9
4.2 Нахождение скоростей и ускорений звеньев механизма 9
5. Построение планов скоростей и ускорений 11
5.1.Построение плана скоростей и ускорений положение 60°. 11
5.2.Сравнение результатов расчетов. 13
6. Силовой анализ механизма 14
6.1.Определение исходных данных силового расчета: 14
6.2.Составление уравнений кинетостатики 18
6.4. Статика 21
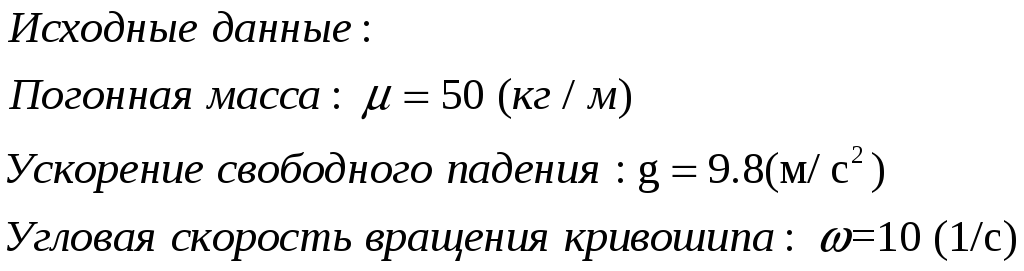
1.Введение.
Исходные данные.
Схема заданного механизма представлена на рисунке 1.
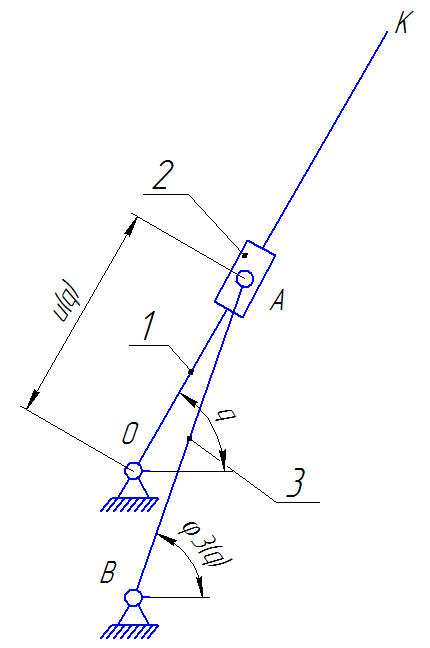
Рисунок 1 — Схема механизма
Длины (м):
2. Структурный анализ
2.1. Задачи структурного анализа механизма
Задачей структурного анализа механизма является определение:
N - количества подвижных звеньев, P - количества кинематических пар, входящих в его состав, а так - же нахождение s - подвижности каждой кинематической пары и w - степени подвижности механизма. В задачу структурного анализа входит также последовательное разделение механизма на структурные группы.
2.2.Структурный анализ
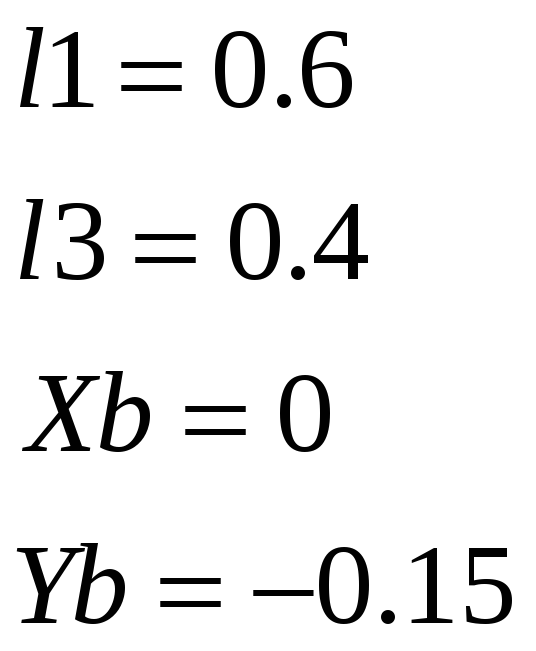
Структурные графы механизма представлены на рисунке 2.1 и 2.2
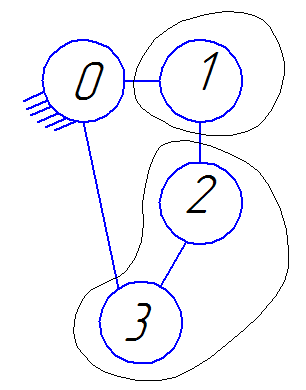
Рисунок 2.2. — Граф механизма
Число подвижных звеньев механизма N=3.
Число низших кинематических пар pн = 4;
Число высших кинематических пар pв = 0;
Степень подвижности механизма:
![]()
Механизм нормальный, т.к. q = W
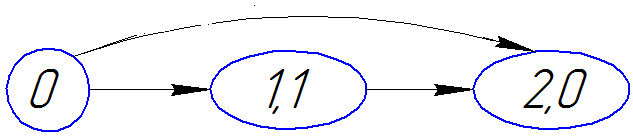
Рисунок 2.3 — Структурный граф механизма
Итак, механизм образован следующим образом: к входному кривошипу и к стойке присоединяется группа Ассура ПВВ.
3. Геометрический анализ механизма
3.1. Задачи геометрического анализа
Целью геометрического анализа является определение функций положения механизма, т. е. зависимостей выходных параметров (координат некоторых точек, углов поворота звеньев) от входных обобщенных координат механизма. Определение этих зависимостей составляет прямую задачу геометрического анализа. Обратная задача: определение значения входных параметров по заданным выходным.
3.2 Составление уравнений геометрического анализа
Уравнения первой группы

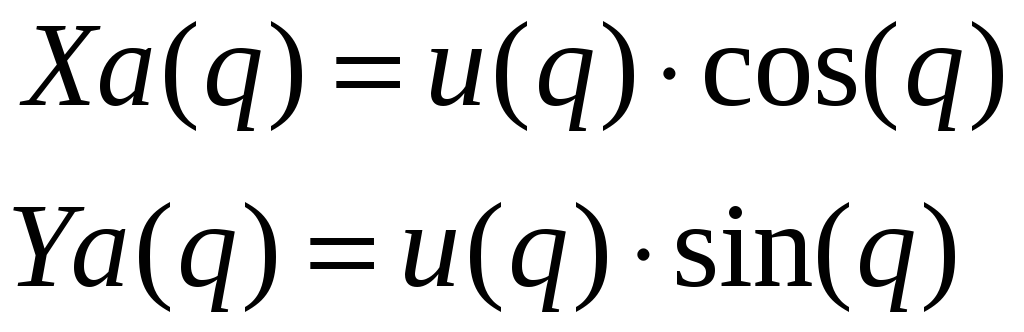
Уравнения второй группы
![]()

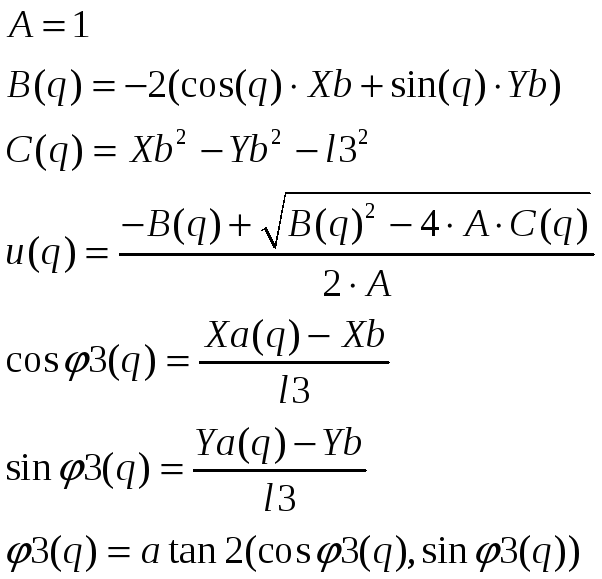
3.3 Решение уравнений геометрического анализа

![]()
Возведем в квадрат, сложим, выразим u(q):
На рисунке 3.1. представлены графики зависимости выходных координат от угла поворота кривошипа q.
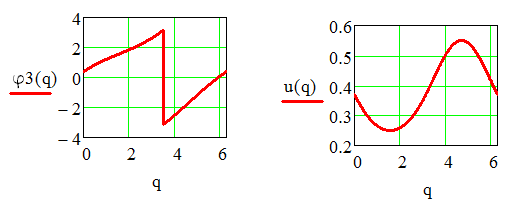
Рисунок 3.1. — Графики зависимости выходных координат от q
3.4. Особые положения структурных групп
В ходе решения уравнений геометрического анализа были вычислены особые положения механизма. На рисунке 3.2. представлено схематическое изображение особых положений механизма.
В данном механизме особые положения недостижимы, что свидетельствует о правильно составленной и рассчитанной схеме машинного агрегата.
Особое положение группа ПВВ:
![]()


![]()
Рассчитаем Якобиан:

Когда J =0 , наступает особое положение:
![]() –
особое положение
группы ПВВ.
–
особое положение
группы ПВВ.
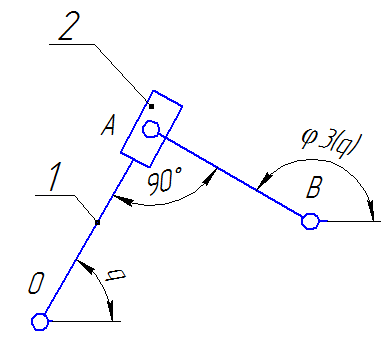
Рисунок 3.2. — Особое положение механизма
3.5. Исследование функции положения
По графику изменения угла выходного звена найдем крайние положения при помощи встроенных функций маткада:

Рисунок 3.3— График угла выходного звена
Найдем первое крайнее положение:
![]()
![]()
![]()
Найдем второе крайнее положение:
![]()
![]()
![]()
Рассчитаем значения рабочего и холостого хода:
![]()
![]()
Рассчитаем коэффициент изменения средней скорости Kv:
Рассчитываем ход выходного звена H (м):
![]()
Рисунок 3.4. —Двенадцать положений механизма
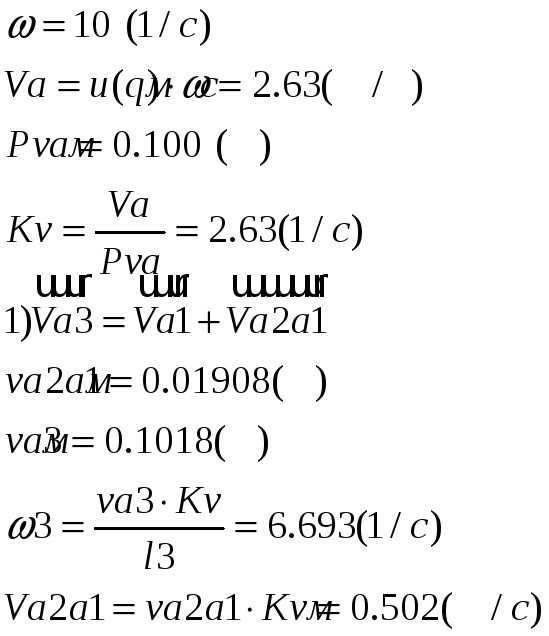
4. Кинематический анализ
4.1.Введение.
Задачей кинематического анализа является определение аналогов скоростей и ускорений точек механизма аналогов угловых скоростей и угловых ускорений его звеньев при заданных первых и вторых производных по времени от обобщенных координат.
4.2 Нахождение скоростей и ускорений звеньев механизма
А налог
скорости – первая производная по
обобщающей координате q.
налог
скорости – первая производная по
обобщающей координате q.
![]()
О пределим
аналоги скорости и ускорения для первой
системы:
пределим
аналоги скорости и ускорения для первой
системы:
![]()
Аналог ускорения – вторая производная по обобщенной координате q:


Ниже, на рисунке 4.1., представлены графики аналогов скоростей выходных координат. На рисунке 4.2. – ускорений, соответственно.
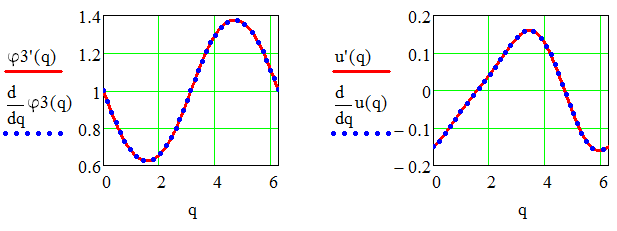
Рисунок 4.1.— Аналоги скоростей звеньев механизма
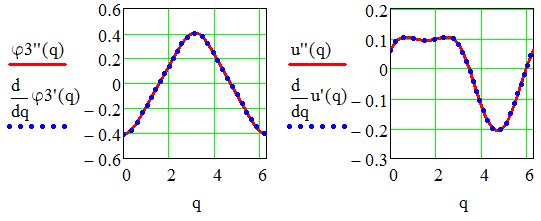
Рисунок 4.2.— Аналоги ускорений звеньев механизма
5. Построение планов скоростей и ускорений
5.1.Построение плана скоростей и ускорений положение 60°.

Рисунок 5.1.— Схема механизма положение 60°.
План скоростей
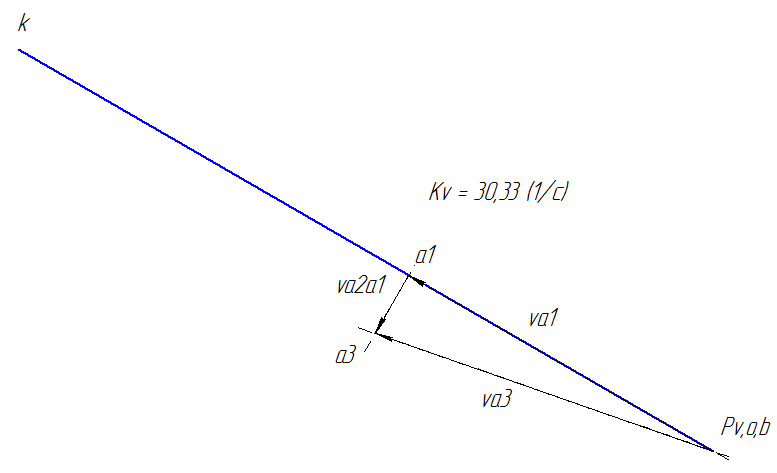
Рисунок 5.2.— План скоростей
План ускорений

Рисунок 5.3.— План ускорений
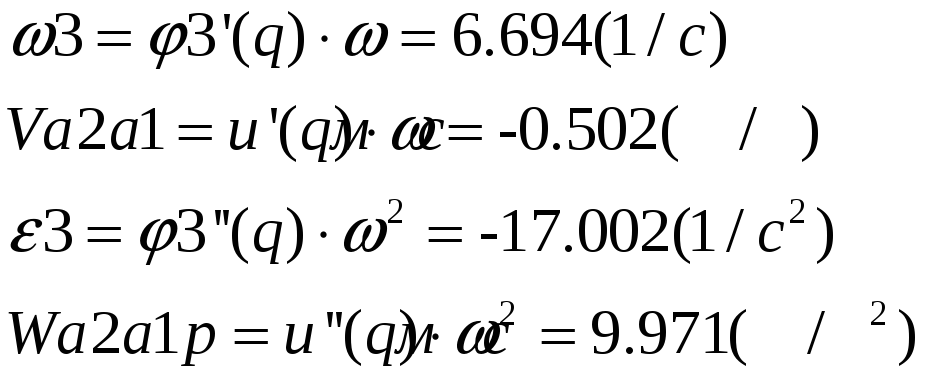
Положение 60 ͦ :
Аналитически:
Графически:
План скоростей:
План ускорений:
5.2.Сравнение результатов расчетов.
Таблица 2. Сравнение результатов двух методов расчета q= 60°
|
Координаты и углы |
Аналитически |
Графически |
|
φ3 |
70.8 ͦ |
70.8 ͦ |
|
u |
0.263 м |
0.263 м |
|
Скорости |
Аналитически |
Графически |
|
ω3 |
6.694 1/c |
6.694 1/c |
|
Va2a1 |
-0.502 м/c |
-0.502 м/c |
|
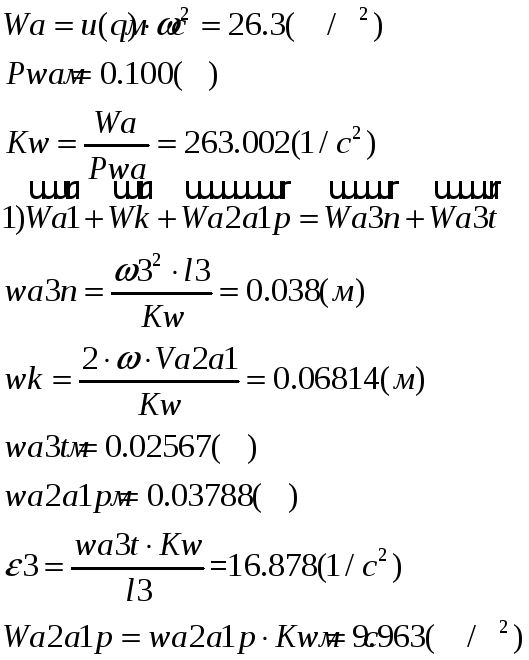
Ускорения |
Аналитически |
Графически |
|
ε3 |
-17.002 c-2 |
-17.002 c-2 |
|
Wa2a1 |
9.971 м/c2 |
9.971 м/c2 |
6. Силовой анализ механизма
6.1.Определение исходных данных силового расчета:
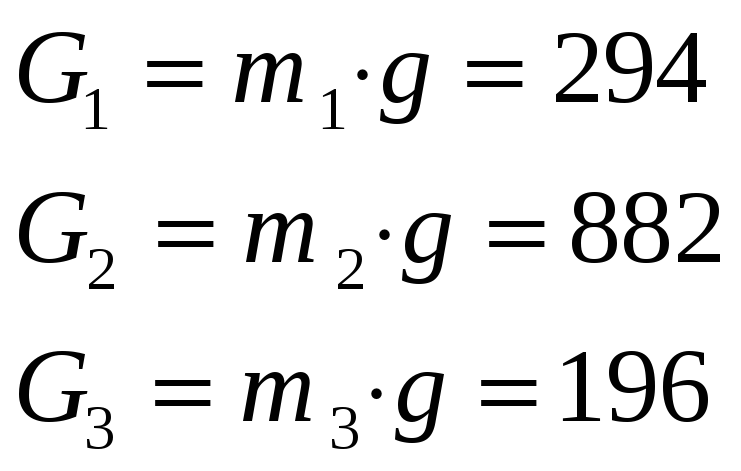
Массы звеньев (кг):

Силы тяжести (Н):
Координаты центров масс, их аналоги скорости и ускорения:
Силы инерции и силы тяжести приложены в точках центра масс звеньев. Для ползунов центр – масс расположен в середине ползуна, а для стержней – на середине длины стержня.
Центр масс звена 3:

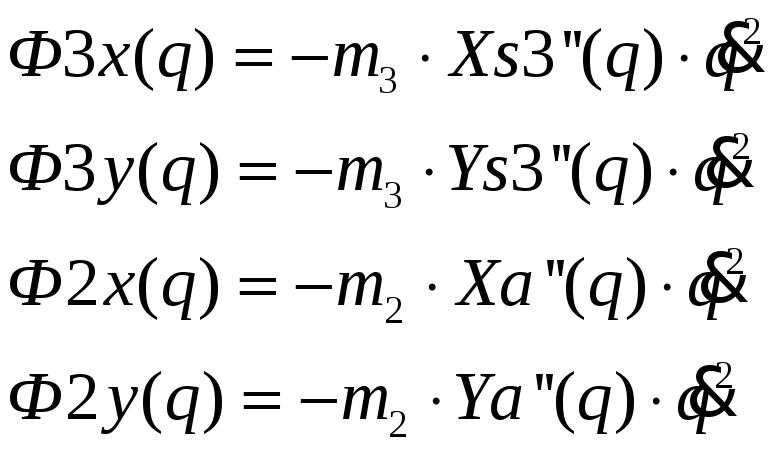
Определение сил инерции (H):
Определение
моментов инерции (![]() ):
):

Определение
моментов сил инерции (![]() ):
):
![]()
График зависимости величины нагрузки от обобщенной координаты
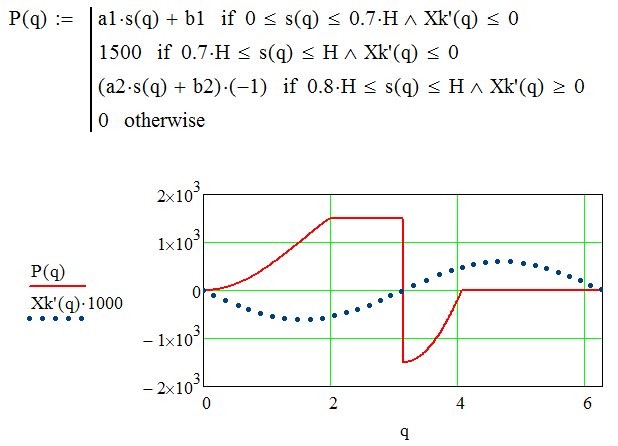
Рисунок 6.1.— График рабочей нагрузки
На схеме механизма (рис.6.2.) изобразим все силы инерции, силы тяжести и моменты сил инерции для всех звеньев механизма.
Схема механизма
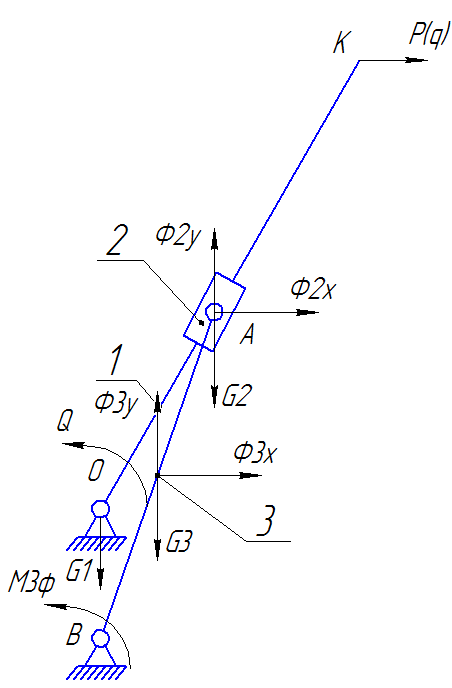
Рисунок 6.2.— Схема механизма со всеми силами
6.2.Составление уравнений кинетостатики
Рассмотрим отдельно структурные группы механизма. Отрываем структурную группу от механизма и в местах отрыва действие других звеньев заменяем реакциями опор.
Определим реакции в кинематических парах для звена 2 и 3:
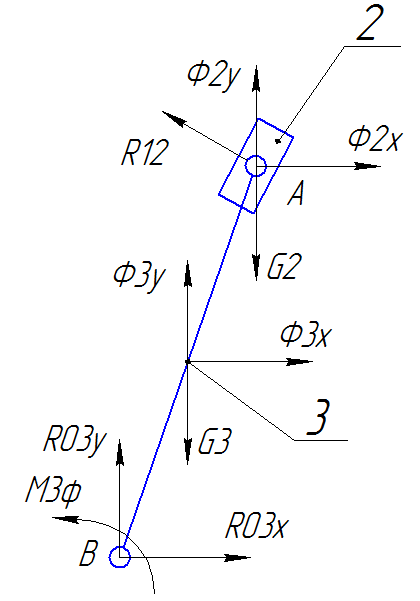
Рисунок 6.3.— Звено 2 и 3
Звено 2 и 3:

Решаем систему
уравнений равновесия в Маткаде и находим
неизвестные реакции опор.
![]()
Определим реакции в кривошипе и найдем движущий момент Q:
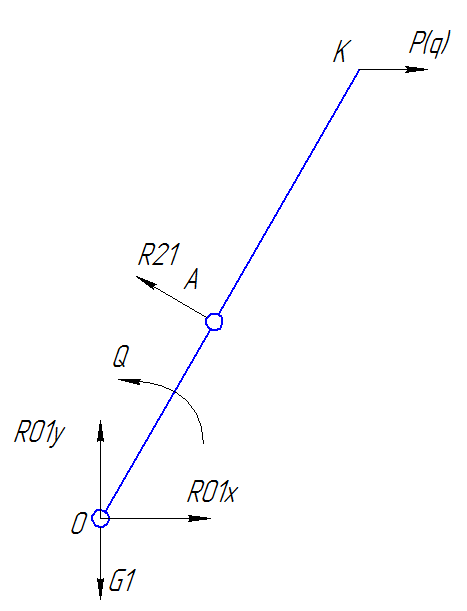
Рисунок 6.4.— Звено 1
Запишем уравнения равновесия для плоской системы (момент берем относительно точки О).

Решаем систему в
Маткаде и находим неизвестные реакции
опор
![]() и
и
![]() ,
а также движущий момент Q.
,
а также движущий момент Q.
6.3.Нахождение движущего момента из общего уравнения динамики
![]()
Для проверки кинетостатического анализа наложим графики зависимости движущего момента Q(q), полученного из общего уравнения динамики и погруппным методом (рис.6.5).
Как видно из рис.6.5. графики зависимости движущего момента для двух методов кинетостатического анализа совпали, поэтому можно говорить в правильности анализа механизма (рис.1.1.).
График зависимости Q1 и Q от q
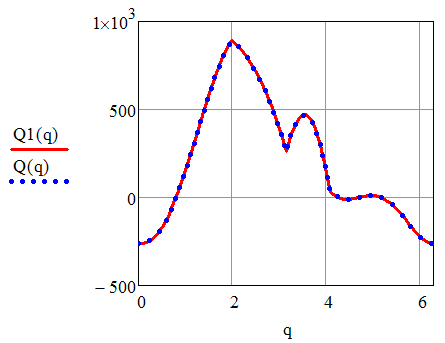
Рисунок 6.5.— Графики движущего момента
6.4. Статика
Звено 2 и 3:
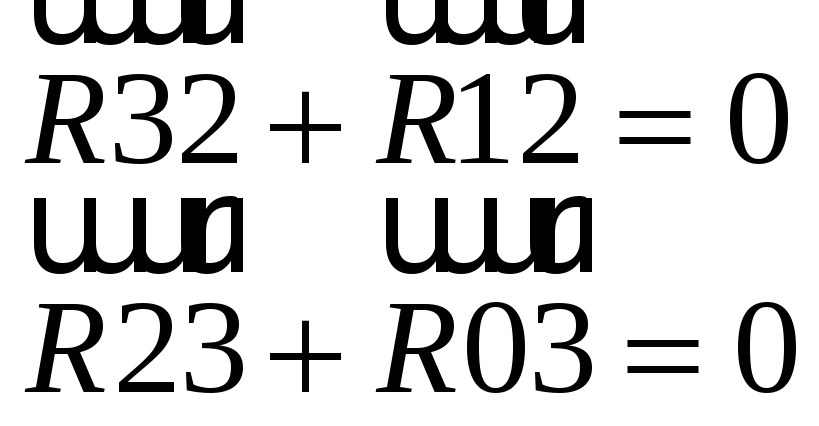
R12=R23=R32=R03=0
Звено 1:
![]()
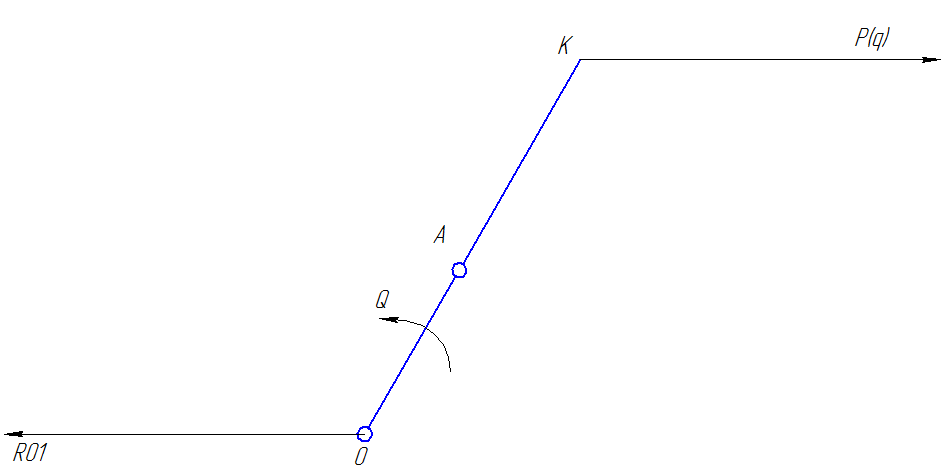
Рисунок 6.6.— Звено 1.
|
Реакции и движ. момент |
Аналитически (Н) |
Графически (H) |
|
R01 |
270 |
535.7 |
|
R12 |
341.3 |
0 |
|
R03 |
710.3 |
0 |
|
Q |
188.6 (Нм) |
278.3 (Нм) |