

7.2. Динамическая теория следования за лидером
Теория следования за лидером является развитием простых динамических моделей, рассмотренных выше. В основу тории положена гипотеза: в плотном потоке взаимодействие автомобилей подчиняется некоторому закону.
Движение автомобиля в потоке описывается дифференциальным уравнением. Поэтому применяются начальные условия. Полагают, что в начальном состоянии все автомобили движутся на расстоянии, определенном правилами дорожного движения. Положение (координаты) автомобилей на дороге определяют по переменной x.
Учитывают следующие расстояния, м:
lО – минимальное расстояние между стоящими автомобилями;
ln – длина автомобиля номер n;
lРn – путь автомобиля номер n за время реакции водителя tР.
Задний автомобиль имеет номер n, передний – номер n + 1 (рис. 22). Задний автомобиль, движущийся со скоростью Vn, за время tР реакции водителя проходит путь tР Vn.
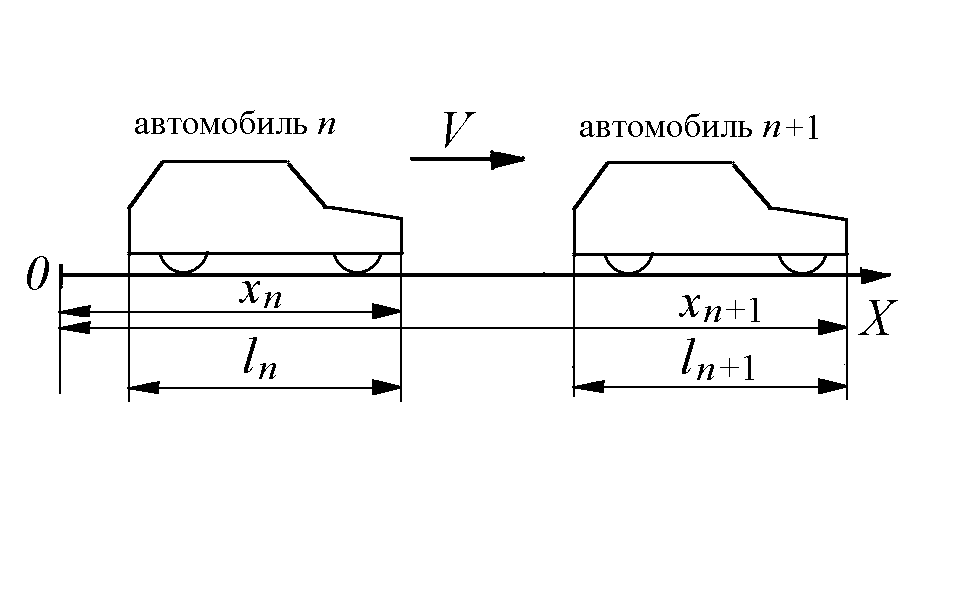
Рис. 22. Номера автомобилей на дороге
Запишем координату xn+1 переднего автомобиля, связывая ее с координатой xn заднего автомобиля:
xn+1 = xn + lО + tР Vn + ln+1. (6.5)
Дифференцируем формулу (6.5) по времени t. Учитываем, что расстояния lО, ln+1 являются постоянными:
xn+1/dt = dxn/dt + tР dVn/dt. (6.6)
Выражаем производные через скорости автомобилей:
xn+1/dt = Vn+1; dxn/dt = Vn; dVn/dt = jn,
где jn, м/с2 – ускорение заднего автомобиля. Получаем уравнение:
jn
= (Vn+1
– Vn)/tР;
![]() (6.7)
(6.7)
Уравнение (6.7) называют первым дифференциальным уравнением теории следования за лидером. Оно выражает следующее: задний автомобиль движется с ускорением прямо пропорциональным разности скоростей переднего и заднего автомобилей. Время tР в дифференциальном уравнении является постоянной времени.
Отношение 1/tР называют коэффициентом пропорциональности или чувствительностью водителя заднего автомобиля и записывают уравнение в виде:
jn = (Vn+1 – Vn). (6.8)
Основной принцип модели следования за лидером заключается в том, что водитель реагирует на разность скоростей, которая рассматривается как раздражение. Реакцией водителя является ускорение, которое создается разгоном автомобиля с помощью педали «газ» или торможением с помощью педали «тормоз».
Запишем уравнения (6.7) для двух автомобилей:
![]() (6.9)
(6.9)
где xn+2 – перемещение переднего, третьего n + 2 автомобиля. Мы получили систему двух дифференциальных. Однако эта система фактически выражает запаздывание движения автомобиля n + 1 относительно автомобиля n + 2, и запаздывание автомобиля n относительно автомобиля n + 1. Оно выражается в сдвиге по времени расстояний и уменьшении амплитуды их изменения.
Исследования, выполненные зарубежными учеными Д. Гейзис, Р. Герман и Р. Потс, показали, что коэффициент не является постоянным. Он зависит от расстояния d между автомобилями и характерной, средней скорости потока v0:
= v0/d. (6.10)
При уменьшении расстояния и увеличении скорости v0 водитель вынужден быстрее реагировать на раздражение.
Запишем уравнение (6.8) с учетом формулы (6.10):
jn = v0 (Vn+1 – Vn)/d. (6.11)
Это уравнение называют вторым основным уравнением теории следования за лидером. Из него следует: ускорение заднего автомобиля прямо пропорционально разности скоростей переднего и заднего автомобилей, и обратно пропорционально расстоянию между ними. В этом уравнении теперь не присутствует время реакции водителя (см. уравнение 6.7).
Системы дифференциальных уравнений, составленные из уравнений (6.11), описывают движение автомобилей в пачке, состоящей из трех и более автомобилей.
По уравнению (6.11) реакция водителя зависит не только от расстояния до следующего перед ним автомобиля. Для анализа этой взаимосвязи предложена обобщенная формула коэффициента чувствительности водителя заднего автомобиля, учитывающая число m автомобилей в пачке:
= З v0m/dсk,
где З 1 – коэффициент, учитывающий чувствительность водителя заднего автомобиля; dс – среднее расстояние между автомобилями в группе. Степень k обычно принимают в пределах от m – 2 до m.
Запишем коэффициент в том виде, в каком он участвует в формуле (6.10): = v0/d. Подставляем размерности и получаем: (м/с)/м = с–1. То есть, обратная величина 1/ также является постоянной времени T.
Пусть поток движется со скоростью 8 м/с (менее 10 км/ч), T = 3 с. Построим график изменения скорости заднего автомобиля при скачкообразном увеличении скорости переднего автомобиля на 4 м/с (рис. 23).
Зависимость скорости от времени выражается экспоненциальным законом с постоянной времени 3 с, для которого на рис. 23 величина = = 0,63 4 = 2, 52 м/с.
Выполнены расчеты движения пачки из 4 автомобилей. Выявлены следующие особенности и закономерности.
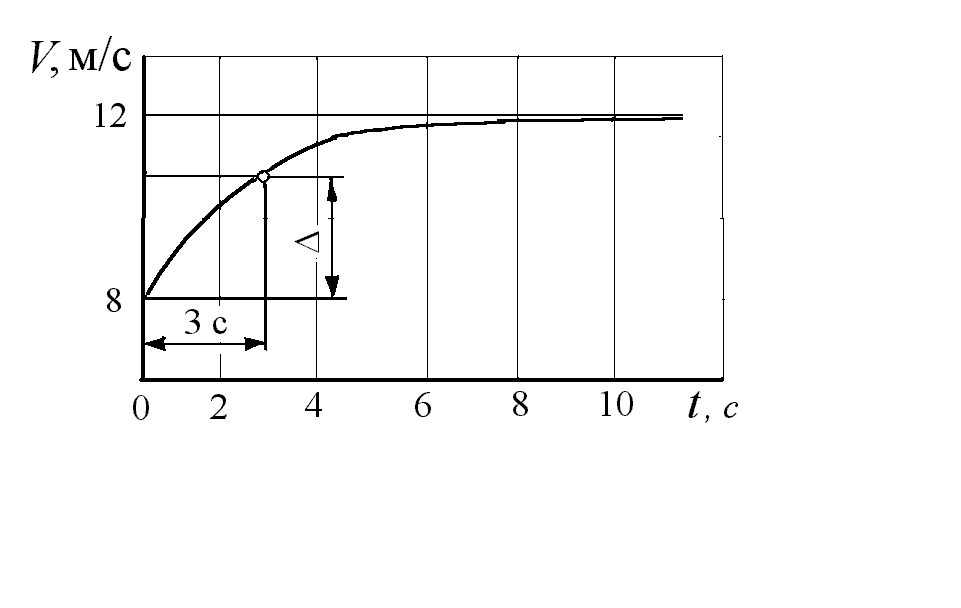
Рис. 23. График приближения скорости заднего автомобиля
к скорости переднего автомобиля 12 м/с
Уравнения (6.7) и (6.11) фактически уже не учитывают расстояния lО и ln между автомобилями в пачке, которые были использованы в расчетной схеме, хотя они имеются в начальных условиях. При увеличении скорости переднего автомобиля пачка растягивается по пути, а при снижении скорости – сжимается. В результате расстояния d между автомобилями не связаны с расстояниями lО, ln и lРn.
Для уточнения уравнений предлагается ввести в формулы дополнительный член:
![]() (6.12)
(6.12)
где – пространственный интервал между автомобилями при средней скорости потока (см. рис.20); d = (2 … 4) v0/d – время реакции водителя на изменение интервала между автомобилями. По величине дополнительный член меньше первого члена в 2 … 4 раза. Он учитывает стремление водителей выдерживать безопасное расстояние или образовывать пачку автомобилей.
При расчете приходится учитывать ограничение максимального замедления автомобиля сцеплением шин с дорогой, и ограничение максимального ускорения по внешней, скоростной характеристике двигателя.
Рассмотрим движение пачки из 4 автомобилей при служебном торможении первого автомобиля с замедлением 3,5 м/с2 в течение 1,5 с. Отношение v0/d примем 0,5 с. Ограничим максимальные ускорения автомобилей 3 м/с2, минимальные замедления – минус 7 м/с2. Примем начальную скорость 60 км/ч. Результаты расчета отобразим на рис. 24 и рис. 25.
Пусть передний автомобиль №4 снизил скорость и движется с этой скоростью равномерно.
Водитель, следующего за ним автомобиля №3, тормозит с запаздыванием с максимальным замедлением 4,2 м/с2. Для выравнивания скорости водитель вынужден разгонять автомобиль, что сопровождается увеличением расхода топлива.
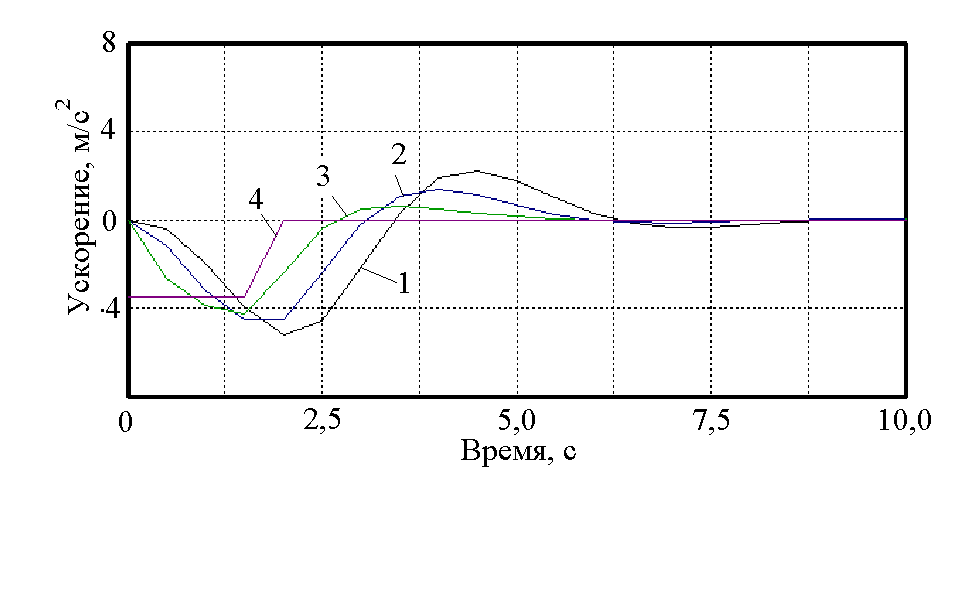
Рис. 24. Ускорения автомобилей в пачке при снижении скорости
переднего автомобиля: 4 – передний автомобиль №4; 3 – №3; 2 – №2; 1 – №1
Водитель автомобиля №2, сначала тормозит с большим запаздыванием с максимальным замедлением 4,4 м/с2. Для выравнивания скорости затем разгоняет автомобиль с максимальным ускорением 1,2 м/с2.
Водитель последнего автомобиля №1, тормозит с максимальным замедлением 5,1 м/с2, и разгоняет автомобиль с максимальным ускорением уже 2,8 м/с2, применяя небольшое замедление для достижения скорости потока.
Расчеты показывают, если передний автомобиль в течение 1,5 с тормозит с замедлением 5 м/с2, то последний автомобиль уже тормозит юзом.
Графики на рис. 24 отражают напряженную работу водителей. Расстояния между автомобилями группы показаны на рис. 25. Расстояния изменяются плавно, что указывает на их невысокую информативность для оценки работы водителей.
На рис. 26 показаны графики изменения ускорений автомобилей в пачке при разгоне переднего автомобиля с ускорением 2 м/с2 в течение 0,7 с со скорости 16,7 м/с до 20 м/с. Интервал между автомобилями 34 м.
Водители автомобилей №3, №2, №1 нажимают на педаль «газ» с запаздыванием и автомобили движутся с ускорением, немного больше ускорения переднего автомобиля. Для выравнивания скоростей применяют замедление, которое можно получить при торможении двигателем.
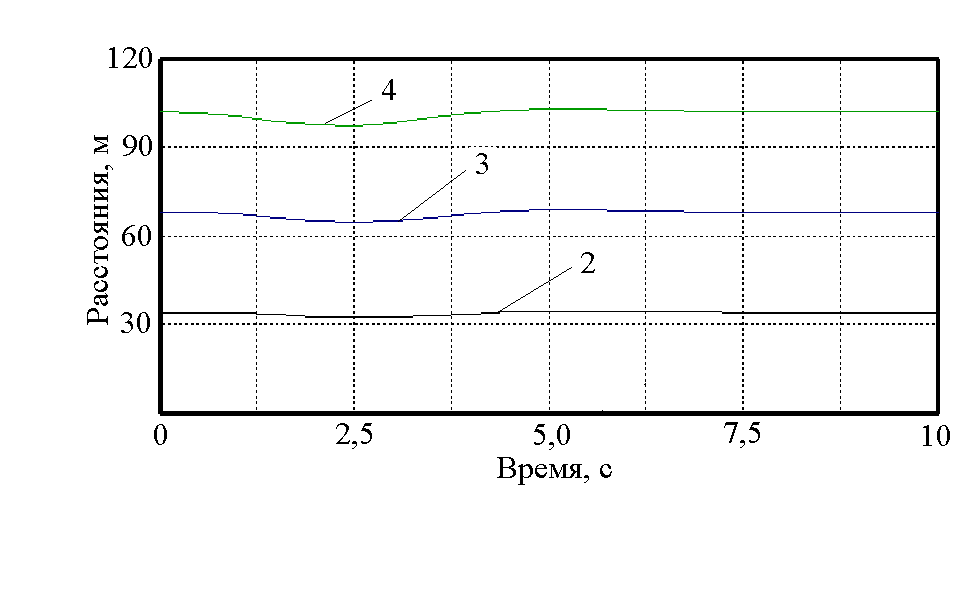
Рис. 25. Расстояния между автомобилями в пачке при снижении скорости
переднего автомобиля: 4 – №4 и №3; 3 – №3 и №2; 2 – №2 и №1
Существует другой подход к определению коэффициента чувствительности и времени реакции водителя в потоке. Он основан на том, что при движении по дороге водитель видит перед собой сечение Q находящегося перед ним автомобиля. Коэффициент связывают с площадью этого сечения и получают аналогичное дифференциальное уравнение:
![]() (6.13)
(6.13)
где k* = f (Q0) коэффициент пропорциональности, m > 1 – степень, учитывающая нелинейность зависимости площади Q от расстояния между автомобилями, Q0, м2 – лобовая площадь автомобиля (площадь Миделя).
Это позволяет учесть состав транспортного потока. Например, известно, что водитель, движущийся за автомобилем большого сечения, для улучшения видимости выдерживает большую дистанцию.
При равномерном движении потока автомобилей расстояния между автомобилями выравниваются, и мы имеем устойчивое движение. Такое движение называют асимптотически устойчивым.
При движении потока с минимальными расстояниями между автомобилями образуются незатухающие колебания расстояний между автомобилями. Движение становится колебательным.
Если в потоке имеют место кратковременные торможения отдельных автомобилей под действием внешних факторов, то движение не стабилизируется, образуются заторы. К образованию заторов приводит установка лишних светофорных объектов, оборудование чрезмерного числа пешеходных переходов, и др.
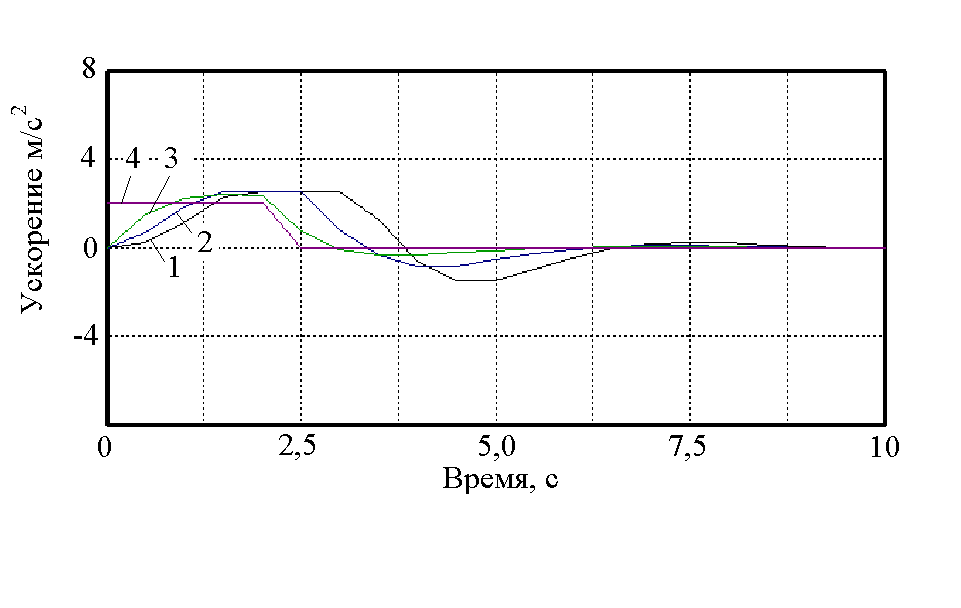
Рис. 26. Ускорения автомобилей в пачке при разгоне переднего автомобиля
со скорости 16,7 до 20 м/с: 4 – передний №4 автомобиль; 3 – №3; 2 – №2; 1 – №1
Теорию следования за лидером используют при расчете процесса разгона пачки автомобилей с перекрестка, при расчете заполнения очереди на перекрестке и др.
Теорию следования за лидером можно применять при расследовании ДТП, в которых имело место движение пачки автомобилей.