

7.1. Простая динамическая теория движения плотного потока
Рассмотрим параметры, характеризующие взаимодействие автомобилей в плотном потоке.
Динамические модели, относящиеся к первой группе, построены на двух гипотезах: все автомобили движутся в потоке с одинаковой средней скоростью; расстояние между автомобилями достаточно для их полной остановки.
Скорость V потока считают независимым параметром. Основной задачей простой динамической теории является описание зависимости пространственного интервала lП от скорости и влияющих факторов. Плотность и интенсивность ТП находят по этому интервалу. Пространственный интервал lП связывают с минимальным, безопасным расстоянием d между бамперами автомобилей.
В первом приближении расстояние d считают суммой:
d = lа + lр + lо, (7.1)
где lа – длина переднего автомобиля; lр = V tр – путь, проходимый задним автомобилем за время реакции водителя; lо – запас пути. Фактически полагают, что тормозные пути переднего и заднего автомобилей одинаковые.
Применение формулы (7.1) дает большие погрешности, так как не учитываются сцепление шин с покрытием, различие тормозных свойств автомобилей и времени реакции водителей.
Во втором приближении расстояние d находят с учетом тормозного пути lт заднего автомобиля:
d = lа + lр + lо + lт. (7.2)
Тормозной путь lт вычисляют по приближенной формуле:
lт = V2/(2 g ),
где – коэффициент сцепления шин с покрытием дороги, g = 9,81. Фактически полагают, что тормозной путь переднего автомобиля равен нулю.
Формула (7.2) лучше описывает экспериментальные зависимости интервала d от скорости на разных дорогах. Однако она дает завышенные значения интервала d, так как передний автомобиль не может мгновенно остановиться. Формула отражает процесс экстренного торможения автомобиля, но не учитывает различие тормозных свойств переднего и заднего автомобилей.
Для учета указанного различия формулу (7.2) усложняют:
d = lа + lр + lо + lт2 – lт1, (7.3)
где lт1, и lт2 – тормозной путь переднего и заднего автомобилей.
Применение формулы вида (7.3) позволяет получить результаты, более близкие к фактическим данным. При расчете можно подбирать значения параметров, отражающих влияющие факторы: время реакции водителя; эксплуатационное состояние тормозов; сцепление шин с покрытием дороги.
Однако результаты расчетов по формуле (7.3), полученные разными исследователями, существенно отличаются (рис. 24). Разница обусловлена различием значений параметров, отражающих влияющие факторы, которые используют исследователи.
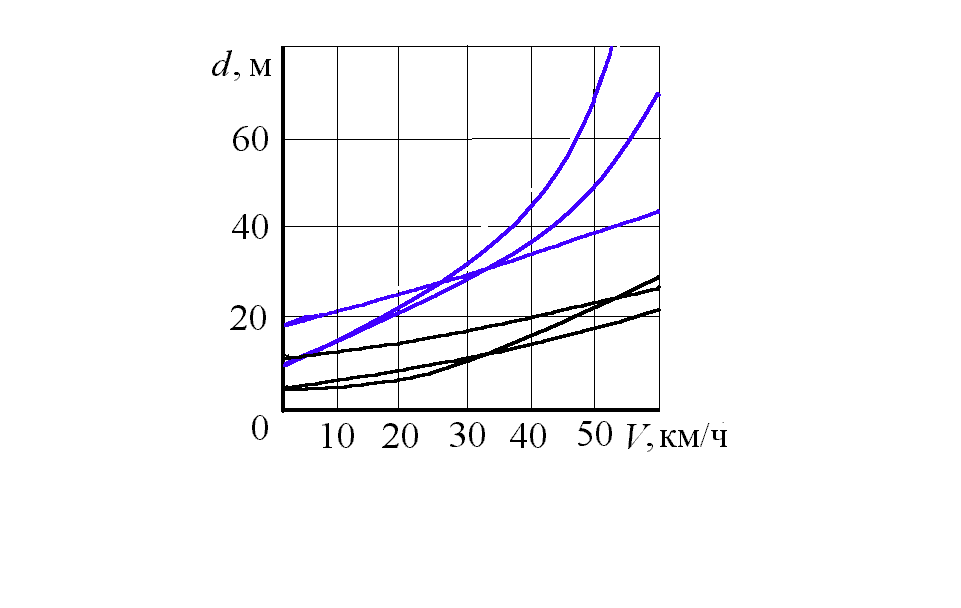
Рис. 24. Зависимости пространственных интервалов от скорости,
рассчитанные разными исследователями
Экспериментальные исследования, выполненные разными авторами, показали, что фактически нет такого существенного различия в величинах расстояний d (рис. 25). Однако время реакции водителей изменяется в широких пределах. Например, при движении в потоке время реакции одного водителя изменяется в течение 2 часов от 0,45 до 1,2 c. Если у переднего автомобиля несправна система сигнализации и не работает сигнал торможения, то при больших расстояниях водитель заднего автомобиля реагирует на торможение иногда через 5 … 6 c.
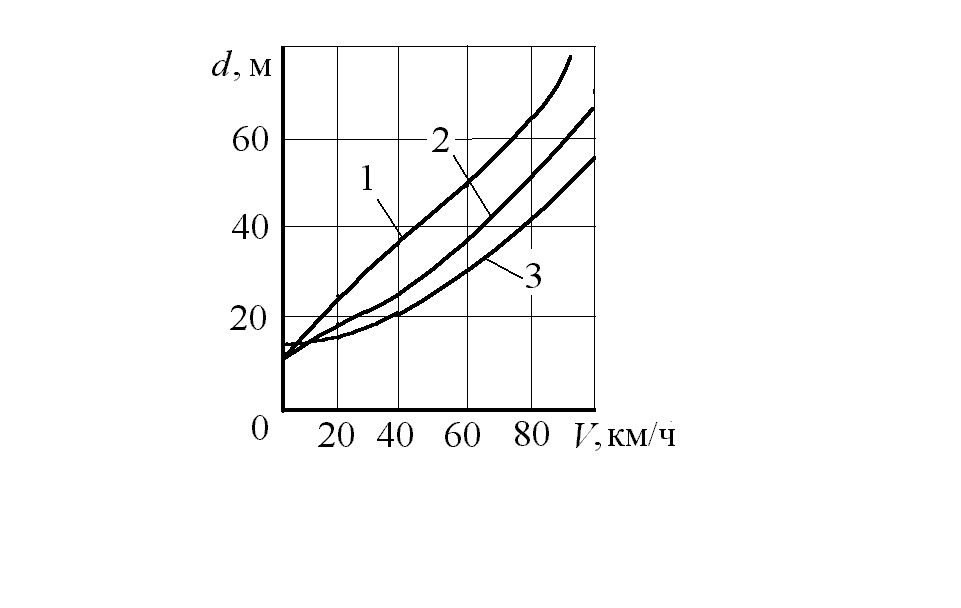
Рис. 25. Экспериментальные зависимости пространственных интервалов
от скорости: 1 – Хорошилов Н.Ф., 2 – Сильянов В.В., 3 – США
Эксперименты, выполненные Лобановым Е.М, показали, что время реакции водителя существенно зависит от времени рабочего дня. В первой половине рабочего дня время изменяется от 0,3 до 0,77 c при среднем значении 0,42 c. Во второй половине рабочего дня время изменяется от 1,13 до 2,25 c при среднем значении 1,4 c. То есть, увеличивается почти в два раза. Установлено, что время реакции водителя распределяется по нормальному закону (рис. 26). Лобановым Е.М. разработана методика расчета времени реакции водителя в различных дорожных условиях.

Рис. 26. Распределение времени реакции водителя на двухполосной дороге:
1 – при ожидаемом сигнале; 2 – при неожиданном сигнале
В книге Сильянова В.В. описано основное уравнение простой динамической модели плотного потока в следующем виде:
d = lо + lр + lт2 – lт1 + lj. (7.4)
Расстояние lо между остановившимися автомобилями принимается в зависимости от скорости движения:
-
V, км/ч
20
40
60
80
100
lо, м
3
6
10
12
15
Путь заднего автомобиля lр за время запаздывания водителя вычисляется по формуле:
lр = t V2 (tр + tmin),
где: t > 1 – параметр безопасности, зависящий от величины времени запаздывания;
V2 – скорость заднего автомобиля; tр – время реакции водителя; tmin – минимальное время, необходимое водителю для осознания ситуации (см. на рис. 26 смещение кривой 2 относительно кривой 1).
Разность lт2 – lт1 тормозных путей вычисляется по формуле:
lт2 – lт1 = V (lт2 –lт1), lт1 = V12/(2 jmax)/k, lт2 = V22/(2 jmax),
где: V – параметр безопасности, зависящий от разности скоростей переднего V1 и заднего V2 автомобиля; если разность V2 > V1, то параметр V 1; если V2 < V1, то V < 1;
параметр k 1 учитывают в том случае, если водитель заднего автомобиля тормозит с замедлением меньше максимального;
jmax – максимальное замедление переднего автомобиля, которое может ожидать водитель заднего автомобиля; оно ограничено коэффициентом сцепления шин;
Поправка lj учитывает способность водителя заднего автомобиля чувствовать величину замедления переднего автомобиля. Поправка вычисляется с помощью функции:
lj = f (а, jmax, t, tр, V2),
где: а – дополнительный коэффициент, учитывающий способность водителя заднего автомобиля чувствовать замедление.
Формула (7.4) позволяет учесть все особенности процесса торможения двух автомобилей. Полный вид функции поправки можно найти в работе Wohl M, Martin V. “Traffic System Analysis”. 1967 – 570 p.
При практическом применении основного уравнения (7.4) необходимы значения 9 параметров. Они зависят от состава и скорости потока, состояния водителей, сцепления шин с дорогой и др. Значения параметров можно найти в специальной литературе.
Расстояния между двумя автомобилями, найденные по простой модели, распространяют на весь поток автомобилей. Такой подход нельзя считать корректным, так как не учитывается разнородность состава плотного потока. На практике выполняют следующие действия:
– по формулам (7.3), (7.4) вычисляют расстояния для комбинаций разных моделей автомобилей;
– используя экспериментальные данные, находят по эмпирическим зависимостям те же расстояния для выбранных комбинаций;
– рассчитывают средние значения, полученные по расчетным и эмпирическим зависимостям.