

Балабина_МУ_динамическое_исслед_механизма
.pdf21
Б. Для двигателей приведенный момент сил сопротивления принимаем постоянным, Мпр.с =const. Величину Мпр.с , определяем из условия, что за период установившегося движения (два оборота кривошипа) ( Адв)=│ Ас│. Таким образом при Мпр.с = const
4
М пр.с 4 М пр.дв d ,
0
т.е за период 4 площадь ограниченная кривой Мпр.дв =Мпр.дв ( ) должна быть равна площади прямоугольника (рис.8), высота которого соответствует искомому Мпр.с. Площадь ограниченная кривой Мпр.дв =Мпр.дв ( ) определяем так же, как для случая А определяли площадь ограниченную кривой Мпр.с =Мпр.с ( ).
Ординату графику Мпр.с=Мпр.с( ) найдем как
уМдв у1 у2 у3 ... у12 [мм],
24
Далее, аналогично (см. пункт А).
График Мпр =Мпр ( ) показан на рисунке 8 .
8. Рассчитать работу всех сил А для основных положений
механизма за период установившегося движения и построить график А= А( ).
Как известно, что
А М прd [ Дж] .
0
Интегрирование проводим приближенным методом подсчета площадей.
|
|
|
|
x |
Так как М nр М уМ |
и |
d dx, то A M yM dx , |
||
|
|
|
|
0 |
x |
|
|
|
|
где yM dx |
- площадь |
слева от |
рассматриваемой ординаты, |
|
0 |
|
|
|
|
ограниченная |
кривой и |
осью о'х'. |
Используя введенные ранее |
|
22
прямоугольники, но отсчитывая их высоты у1 , у2 , у3 , ... от новой оси абсцисс о'х' (рис.7),можем записать
А 0; |
|
[ Дж] |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
А |
|
|
|
|
|
х1об |
|
|
|
у |
; [ Дж] |
|
||||||||
М |
|
|
|
|
|
|
|
|||||||||||||
1 |
|
|
|
|
|
12 |
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А А |
|
|
|
|
|
|
|
|
|
|
х1об |
|
у |
|
; |
[ Дж] |
||||
М |
|
|
|
|
2 |
|||||||||||||||
2 |
|
1 |
|
|
|
|
|
12 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
А А |
|
|
|
|
|
|
|
|
х1об |
у |
|
; |
[ Дж] |
|||||||
М |
|
|
|
3 |
||||||||||||||||
3 |
|
2 |
|
|
|
|
|
|
12 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и т.д. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Знаки ординат у1 , |
у2 , |
|
у3 , .... определять в зависимости от их |
|||||||||||||||||
расположения относительно оси о'х'. |
|
|
|
|
|
|
|
|||||||||||||
В конце периода установившегося движения сумма работ всех сил должна быть равна нулю, т.е. для станков, прессов и компрессоров А12=0 , а для двигателей А24=0.
График А = А ( ) построить над графиком Мпр =Мпр ( ). Масштаб А Дж/мм выбрать произвольно.
Для одного из механизмов станка график А( ) изображен на
рис.9.
9. Определить закон изменения угловой скорости звена приведения для основных положений механизма за период установившегося движения и построить график ω=ω( ) .
Угловую скорость кривошипа определяем с помощью уравнения движения машины, записанного для звена приведения:
|
|
|
|
Iпр |
|
|
Iпр0 0 |
M |
прd , где |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
2 |
|
|
2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
I |
пр0 |
2 |
|
|
|
|
|
|
|
|
0 |
Т0 - кинетическая |
энергия механизма в начальном |
||||||
|
2 |
||||||||
|
|
|
|
|
|
|
|
||
положении,
|
|
|
|
23 |
I |
пр |
2 |
|
|
|
|
T |
- кинетическая энергия механизма в рассматриваемом |
|
|
|
|
||
|
|
2 |
||
|
|
|
|
|
|
|
|
|
i-том положении, |
M прd A - сумма работ сил движущих и сил сопротивления при
0
перемещении звена приведения из начального положения в рассматриваемое.
рис.9 При определении из написанного уравнения ω затруднение
представляет определение начального значения ω0 , так как разгон машины нами не рассматривается.
24
При выполнении задания условно считаем, что в выбранном нами начальном положении угловая скорость кривошипа равна средней угловой скорости
0 |
cр |
|
п |
с 1 . Тогда |
Т |
0 |
I |
пр0 |
ср2 |
, где I |
|
- величина |
|
|
|
|
пр0 |
||||||||
30 |
|
|
2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
приведенного момента инерции в начальном положении механизма. При известном Т0 угловую скорость кривошипа для различных
положений механизма определяем по формуле
|
|
|
2(T0 |
A) |
|
1 |
|
, |
|
|
|
|
|||||||
|
|
|
I |
|
|
|
|
|
|
|
|
|
пр |
|
c |
|
|
||
где обязательно должен учитываться знак А. Значения Iпр брать из таблицы 2.
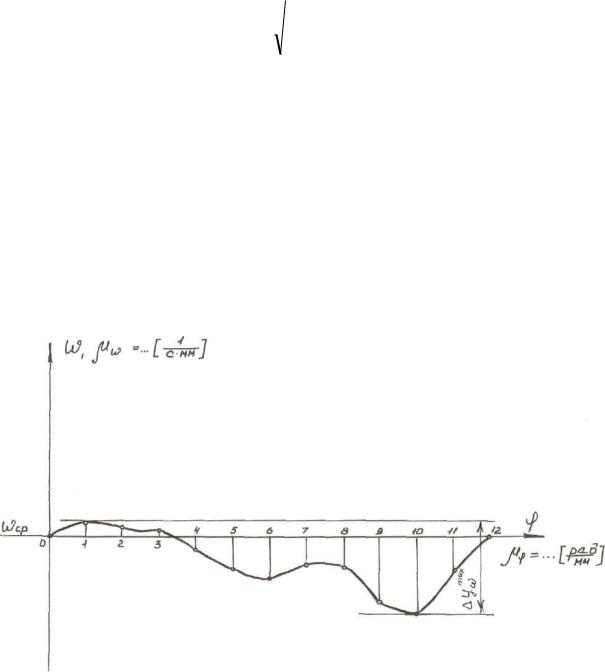
При построении графика ω = ( ) ось абсцисс совместить со средней угловой скоростью кривошипа, а по оси ординат откладывать приращения i относительно о с учетом знака.
Масштаб |
|
|
1 |
выбрать произвольно. Для механизма станка |
|
|
|
|
|
||
|
|
|
|||
|
c |
мм |
|
||
график ω = ( ) |
изображен на рис.12. |
||||
рис. 12
25
10. Рассчитать коэффициент неравномерности для механизма
без маховика.
По найденным значениям коэффициент неравномерности
рассчитываем по формуле max min . Разность |
max |
min равна |
|
|
ср |
|
|
произведению ymax на масштабный коэффициент μω |
|
|
|
|
max min y max ·μω . |
|
|
Если |
полученный коэффициент неравномерности |
больше |
|
заданного |
коэффициента неравномерности зад , |
то |
необходим |
маховик. |
|
|
|
11. Определить момент инерции маховика, обеспечивающий заданный коэффициент неравномерности зад.
Практикой установлены те значения коэффициента неравномерности , при которых та или иная машина работает удовлетворительно. Если при заданных силах и массах в машине не обеспечивается допустимый коэффициент неравномерности δзад (см. исходные данные), то для его уменьшения, т.е. для достижения более равномерного движения, на одном из валов машины устанавливают маховик. С введением маховика возрастает кинетическая энергия машины, в результате чего те же по величине колебания кинетической энергии составляют меньший процент от общего ее значения. Соответственно сокращаются колебания угловой скорости кривошипа.
Момент инерции маховика, обеспечивающего заданный
коэффициент неравномерности |
зад, |
определяем |
по методу |
Н.И.Мерцалова. |
|
|
|
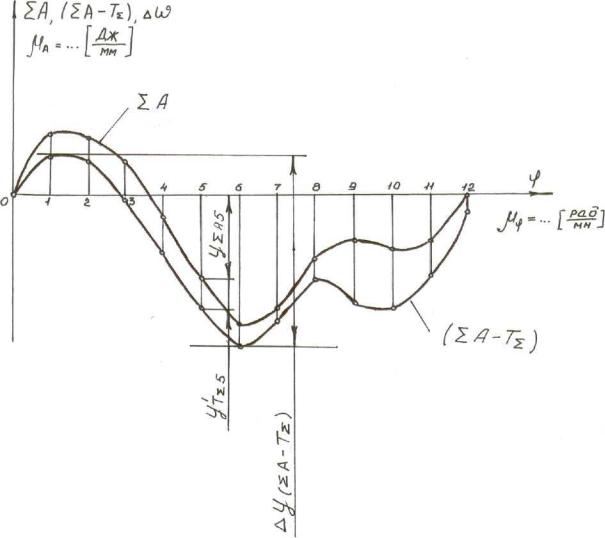
Поскольку графики А = |
А( ) и |
Т = Т ( ) |
для периода |
установившегося движения на листе уже построены, то можно построить и график функции [ А-Т ]=[ А-Т ]( ). Для этого ординаты графиков А = А( ) и Т = Т ( ) следует привести к
26
одинаковому масштабу. Целесообразно график Т =Т ( ) построить в масштабе μА графика А( ). Для механизма станка график Т =Т ( )
в масштабе μА показан на рисунке 3 пунктирной линией. Ординаты |
|
кривой Т =Т ( ) в масштабе μА, обозначенные через |
у Т , |
рассчитываются по формуле: |
|
|
|
T i |
[мм], |
|
|
|
|
|
|
|
|||
|
yT |
A |
|
|
||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
где значения Т i |
берутся из таблицы 2. |
График [ А-Т ]=[ А-Т ]( ) |
||||
строим , вычитая из ординат графика А= А( ) ординаты у |
, как |
|||||
|
|
|
|
|
Т |
|
показано на рисунке 9. |
|
|
|
|
|
|
Замерив на графике [ А-Т ]=[ А-Т ]( ) отрезок |
уmax( A - T ), |
|||||
изображающий |
в масштабе |
|
А |
максимальное изменение |
||
кинетической энергии маховых масс, определяем момент инерции маховых масс по формуле
I |
м.м. |
y( A T ) A |
[кг∙м2]. |
||
|
|
2 |
|||
|
|
|
зад ср |
|
|
Затем определяем момент инерции маховика: |
|||||
I |
маховика |
= I |
- I |
[кг∙м2]. |
|
|
м.м |
пр.const |
|
||
27
Учебное издание
Балабина Татьяна Александровна
Дмитриева Любовь Николаевна
Кореновский Владимир Викторович
Мамаев Алексей Николаевич
Методические указания по «Теории механизмов и машин»
«ДИНАМИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА».
Под редакцией авторов
Оригинал-макет подготовлен редакционно-издательским отделом
Университет машиностроения
По тематическому плану внутривузовских |
изданий учебной литературы на 2013 г. |
|
Подписано в печать |
. Формат 60*90 1/16. Бумага 80г/м2 |
|
Гарнитура «Тайме». Ризография. Усл. печ. л. 3,0. |
||
Тираж |
экз. |
Заказ № . |
Университет машиностроения
107023, г. Москва, Б. Семеновская ул., 38.