

Теория систем автоматического управления. В.А. Бесекерский, Е.П. Попов, 1975
.pdf .
.
Эти сигналы называются боковыми частотами. Название произошло по следующей причине. Если на вход звена поступает постоянный по величине сигнал,
то его можно представить как сигнал нулевой частоты. В этом случае коэффициент передачи звена равен ординате
пересечения амплитудной характеристикой оси ординат. В рассматриваемой. RC-цепи этот коэффициент равен единице, т. е. k=1.
Если теперь на вход звена подать сигнал, представляющий собой гармоническую функцию, то реакцию звена на такой сигнал можно получить, рассматривая реакцию звена на две частоты, расположенные симметрично относительно исходной нулевой частоты. Эти две частоты и являются боковыми по отношению к исходной частоте.
При наличии амплитудной частотной характеристики (рис. 4.28) постоянная времени звена может быть определена по эффекту подавления боковых частот по сравнению с исходной нулевой частотой. Из выражения для амплитудной частотной характеристики апериодического звена первого порядка (см. табл. 4.3) в общем случае, когда k ≠1,
A(w) = |
k |
||
1 + w2T 2 |
|||
|
|
||
следует, что на нулевой частоте коэффициент передачи звена по амплитуде равен k, |
|||
а при w= 1/T этот коэффициент равен |
k |
= k = 0.707k |
|
A( 1 ) = |
|||
T |
1+1 |
2 |
|
На основании этого соотношения по амплитудной характеристике можно легко найти постоянную времени. Для этой цели на высоте 0,707k проводится горизонтальная линия до пересечения с амплитудной характеристикой.
Абсциссы точек пересечения |
будут равны 1/T в области положительных частот и |
||||
-1/T в области отрицательных частот. |
|
|
|
|
|
Расстояние между точками пересечения часто называют полосой пропускания звена |
|||||
|
∆w |
= |
2 |
(4.25): |
|
|
|
||||
|
п |
T |
|
|
|
|
|
|
|
|
|
Постоянная времени может |
быть вычислена по полосе пропускания: |
||||
|
T = |
2 |
|
(4.67) |
|
|
∆wп |
|
|||
|
|
|
|
||
Обратимся теперь к звену с модулированным сигналом. Предположим, что динамические свойства некоторого звена изучаются при помощи частотных характеристик (рис. 4.29). Постоянному сигналу на входе такого звена соответствует напряжение

u1 =U1max cos w0t (4.68)
где w0 — несущая угловая частота.
 .
.
Допустим теперь, что сигнал (огибающая) изменяется по гармоническому закону с угловой частотой Ω. Это значит, что по гармоническому закону должна изменяться амплитуда в выражении (4.68), и модулированный сигнал может быть представлен в виде
u1 =U (t) cos w0t =U1max sin Ωt cos w0t |
(4.69) |
||||
где U (t) =U1max sin Ωt — гармонический закон |
изменения огибающей (сигнала). |
||||
Это выражение может быть преобразовано к виду |
|
|
|||
u |
= |
U1max |
[sin(w + Ω)t −sin(w − Ω)t] |
(4.70) |
|
|
|||||
1 |
2 |
0 |
0 |
|
|
|
|
|
|
||
Таким образом, модулированный сигнал (4.69) может быть заменен двумя гармоническими сигналами с частотами, равными сумме и разности несущей частоты и частоты огибающей: w1 = w0 + Ω и w2 = w0 −Ω . Эти гармонические сигналы являются
боковыми частотами.
Выясним теперь, какой должна быть амплитудная частотная характеристика звена, чтобы по отношению к модулированному сигналу звено представляло собой, например, апериодическое звено первого порядка. Очевидно, что характеристика должна быть такой же самой, как характеристика апериодического звена с немодулированным сигналом, но она должна быть симметричной относительно несущей частоты w0 (рис. 4.29). Тогда боковые частоты будут подавляться рассматриваемым звеном так же, как они подавляются звеном с немодулированным сигналом (рис. 4.28).
Постоянную времени звена с модулированным сигналом, если оно представляет собой для огибающей апериодическое звено первого порядка, можно определить по той
частоте огибающей, при которой боковые частоты подавляются в  2 раз.
2 раз.
Для этого, аналогично предыдущему, на амплитудной частотной характеристике звена (рис. 4.29) должно быть сделано следующее построение. Необходимо определить коэффициент передачи звена k на несущей частоте, что соответствует постоянному входному сигналу (4.68) или частоте огибающей Ω = 0 . Затем на высоте 0,707k проводится горизонтальная прямая до пересечения с частотной характеристикой и определяется полоса пропускания ∆wп . Постоянная времени определяется на основании
(4.67) и равна T = ∆w2 п
Рассмотренная выше методика позволяет сформулировать правило, устанавливающее требования к амплитудной частотной характеристике звена с модулированным сигналом для того, чтобы его воздействие на огибающую было таким же, каким является воздействие обычного звена заданного типа на немодулированный

сигнал. Это правило сводится к следующему. Амплитудная частотная характеристика звена с модулированным сигналом должна быть такой же, как амплитудная частотная характеристика звена с немодулированным сигналом, но эта характеристика должна быть симметричной не относительно оси ординат, а относительно несущей частоты. Звено с немодулированным сигналом может рассматриваться при этом как частный случай звена с модулированным сигналом при несущей частоте w0 = 0.
Для того чтобы избежать ошибок в связи с наличием неминимально-фазовых звеньев, сформулированное выше правило для амплитудных характеристик должно быть дополнено аналогичным правилом для фазовых частотных характеристик. Если известно, что все рассматриваемые звенья относятся к категории минимально-фазовых звеньев, то привлечение фазовых характеристик не является необходимым и можно ограничиться использованием только амплитудных характеристик.
Таким образом, в общем случае, если обозначить эквивалентную частотную передаточную функцию по огибающей Wэ ( jΩ) , то для частотной передаточной функции
звена с модулированным сигналом W(jw) должно выполняться условие
W ( jw) =Wэ ( jΩ) Ω=w−w0 =Wэ ( j(w − w0 ) (4.71)
Так, например, если необходимо, чтобы по своему действию на огибающую модулированного сигнала звено соответствовало апериодическому звену первого порядка с эквивалентной частотной передаточной функцией
Wэ( jΩ) = |
|
|
k |
|
1 |
+ jΩT |
|||
|
||||
то оно должно иметь частотную передаточную функцию
W ( jw) = |
k |
1+ j(w − w )T |
|
|
0 |
Приблизительно такую передаточную функцию имеют, в частности. резонансные усилители, настроенные на несущую частоту w0, причем постоянная времени Т определяется полосой пропускания усилителя в соответствии с (4.67).
Проиллюстрируем применение изложенного правила на другом примере. Возьмем рассмотренную ранее дифференцирующую RС-цепь (рис. 4.24, а). Эта цепь годится для дифференцирования немодулированного сигнала. Если на ее вход подать модулированный сигнал, то дифференцирования не получится. Действительно, рассмотрим входной сигнал u1 =U1 (t) cos w0t , где U1 представляет собой закон изменения
амплитуды во времени, т. е. огибающую или сам передаваемый сигнал. Продифференцируем это выражение, считая для простоты, что дифференцирующая цепь идеальна:
du1 |
= |
dU1 (t) |
cos w t − w U |
(t)sin(w t) (4.72) |
||
|
|
|||||
dt |
|
dt |
0 |
0 |
1 |
0 |
|
|
|
|
|
||
В результате получилось два слагаемых. Первое слагаемое является полезным, так как содержит требуемую производную от огибающей, а второе — вредным, так как оно представляет собой ложный сигнал, который может в сотни и тысячи раз превышать по уровню полезный сигнал.
Амплитудная частотная характеристика дифференцирующей RС-цепи (дифференцирующего звена с замедлением) изображена в табл. 4.7. Для получения дифференцирования огибающей модулированного сигнала необходимо осуществить такую цепь, у которой амплитудная характеристика была бы подобна изображенной в табл. 4.7 и была бы при этом расположена симметрично относительно несущей частоты. Такая характеристика изображена на рис. 4.30, а.
 .
.
Из рассмотрения характеристики следует, что звено не должно пропускать несущую частоту. Это должно быть понятным и физически, так как несущая частота в чистом виде, т. е. отсутствие боковых частот, будет при постоянном сигнале на входе (см. (4.68)). В этом случае производная сигнала (по огибающей) будет равна нулю и на выходе звена не должно быть никакого сигнала.
При изменении сигнала по какому-либо закону, например в соответствии с выражением (4.69), появятся боковые частоты, которые будут пропускаться звеном тем сильнее, чем дальше они отстоят от несущей частоты, т. е. чем больше частота огибающей. Таким образом, звено будет обладать дифференцирующими свойствами по отношению к огибающей модулированного сигнала.
Амплитудная частотная характеристика, изображенная на рис. 4.30, а, может реализоваться различным образом. Такая характеристика может быть получена, например, от резонансной параллельной LС-цепи, Т-образной цепи и т. п., настроенных на несущую частоту (рис. 4.30, б и в).
Обратимся теперь ко второй указанной выше задаче. При известной частотной передаточной функции звена W(jw) определим эквивалентную частотную передаточную функцию Wэ( jΩ) для огибающей модулированного сигнала. Для этого вспомним, что
частотная передаточная функция звена (4.17)
W ( jw) = A(w)e jψ =U (w) + jV (w)
представляет собой комплексное число, модуль которого А(w) равен отношению амплитуд выходной и входной величин, а аргумент ψ — сдвигу фаз при гармоническом
входном сигнале в установившемся режиме. Если на входе звена действует величина x1 (t) = X1max sin wt , то на выходе будет
x2 (t) = X sin(wt +ψ) = X A(w)sin(wt +ψ) = X [U (w)sin wt +V (w) cos wt]
(4.73)
Для получения частотной передаточной функции по огибающей Wэ( jΩ) звена с
модулированным сигналом обратимся к гармоническому сигналу по огибающей (4.69). Разложим его на боковые частоты w0 + Ω и w0 −Ω: в соответствии с выражением (4.70).
Тогда, используя зависимость (4.73) получим
u |
(t) = |
U1max |
[U(w +Ω)sin(w +Ω)t +V (w +Ω)cos(w +Ω)t −U(w −Ω)sin(w −Ω)t − |
|
|||||
|
|
||||||||
2 |
2 |
0 |
0 |
0 |
0 |
0 |
0 |
(4 . |
|
|
|
|
|
|
|
|
|||
−V(w0 −Ω)sin(w0 −Ω)t]
74)
где U(w) и V(w) — вещественная и мнимая части частотной передаточной функции
W(jw).
Путем разложения синусов и косинусов сумм и разностей углов это выражение преобразуется к виду
|
|
U(w0 +Ω) +U(w0 |
−Ω) |
|
|
V(w0 +Ω) −V(w0 |
−Ω) |
|
|
u2 |
(t) =U1max |
|
|
sinΩt + |
|
|
cosΩt cosw0t + |
||
2 |
|
2 |
|
||||||
|
|
|
|
|
|
|
|
||
|
U(w0 +Ω) −U(w0 −Ω) |
|
|
V (w0 +Ω) +V(w0 −Ω) |
|
|
|||
+U1max |
|
|
sinΩt + |
|
|
sinΩt sin w0t |
|||
|
2 |
|
2 |
||||||
|
|
|
|
|
|
|
|||
(4.75)
Остановимся теперь на двух важных частных случаях.
1. Рассмотрим случай «симметричной» относительно несущей частоты частотной передаточной функции, что определяется равенством W[ j(w0 + Ω)] =W *[ j(w0 −Ω)] , где
звездочкой отмечена сопряженная комплексная величина. Из этого равенства вытекают два других:
U (w0 + Ω) =U (w0 −Ω) и V (w0 + Ω) = −V (w0 −Ω) .
Тогда формула (4.75) существенно упрощается и может быть записана в виде u2 (t) =U1max[U(w0 +Ω)sinΩt +V (w0 +Ω)cosΩt]cosw0t (4.76)
Рассматривая огибающую, т. е. отбрасывая множитель cos w0t , и сравнивая
выражения (4.76) и (4.73), убеждаемся, что эквивалентная частотная передаточная функция для огибающей Wэ( jΩ) может быть получена из частотной передаточной
функции звена W(jw) подстановкой w = w0 + Ω:
Wэ ( jΩ) =W ( jw) |
|
Ω=w−w0 =W ( j(w − w0 )) |
(4.77) |
|
|
||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|
|
|||||||||||||||
что согласуется с полученной ранее формулой (4.71). |
|
|
|
|
|
|
|
|
|
||||||||||
Так, например, если звено типа |
|
резонансного усилителя |
имеет |
частотную |
|||||||||||||||
передаточную функцию |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( jw) = |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1+ j(w − w )T |
|
|
|
|
|
|
|
|
||||||||
то передаточная функция для огибающей будет |
0 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
э |
( jw) = |
|
|
|
k |
|
|
|
= |
|
|
|
k |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1+ j(w − w0 )T |
|
w=w0 |
+Ω |
1 |
+ jΩT |
|
jΩ = p . В |
||||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
Переход к обычной передаточной функции может быть сделан заменой |
|||||||||||||||||||
результате из (4.77) получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Wэ ( p) =W ( jw0 + p) |
(4.78) |
|
|
|
|
|
|||||||||||
2. Рассмотрим теперь другой важный случай, когда передаточная функция W(jw) не является «симметричной», но слагаемое в формуле (4.75), определяемое множителем sinw0t, отсеивается в последующих звеньях каким-либо фазочувствительным устройством, например фазовым дискриминатором. Тогда это слагаемое может быть отброшено и
формула (4.74) упрощается: |
|
|
|
|
|
|||||
|
U(w0 +Ω) +U(w0 −Ω) |
|
V(w0 +Ω) −V(w0 −Ω) |
|
|
|||||
u2 (t) =U1max |
|
|
|
sinΩt + |
|
|
cosΩt cosw0t |
(4.79) |
||
|
2 |
|
2 |
|||||||
|
|
|
|
|
|
|||||
Так как |
U(w)—функция четная, а V(w) — нечетная, выражение может быть |
|||||||||
представлено в следующем виде: |
|
|
|
|
|
|||||
|
U(w0 +Ω) +U(w0 −Ω) |
|
V(w0 +Ω) +V (w0 −Ω) |
|
|
|||||
u2 (t) =U1max |
|
|
|
sinΩt + |
|
|
cosΩt cosw0t |
(4.80) |
||
|
2 |
|
2 |
|||||||
|
|
|
|
|
|
|||||
В этом |
случае |
эквивалентная |
частотная передаточная функция |
для |
||||||
огибающей может быть определена из выражения
|
Wэ ( jΩ) = |
W[ j(Ω + w0 )] +W[ j(Ω − w0 )] |
(4.81) |
|
|||||||
|
|
|
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Аналогичный результат |
|
может |
быть получен, |
|
если |
фазочувствительное |
|||||
устройство |
пропускает |
|
|
сигнал |
фиксированной |
|
|
фазы, |
например |
||
U (t) cos(w0t +ϕ) , |
где ϕ = const . |
|
Тогда вместо выражения |
(4.81) |
получается |
|
|||||
|
Wэ ( jΩ) = |
W[ j(Ω + w |
)]e jϕ +W[ j(Ω − w |
)]e− jϕ |
(4.82) |
|
|||||
|
|
|
0 |
0 |
|
|
|
||||
|
|
|
|
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Переход к обычной передаточной функции Wэ ( p) делается, |
как и выше, заменой |
||||||||||
jΩ = p . |
|
|
|
|
|
|
|
|
|
|
|
Формулы (4.81) и (4.82) позволяют просто находить передаточную функцию по огибающей. Однако к ним следует относиться с осторожностью. Сформулированное выше условие применимости этих формул заключалось в том, что можно было отбросить слагаемое в (4.75), пропорциональное sinw0t, и оставить слагаемое, пропорциональное cosw0t или в общем случае cos(w0 +ϕ) . Однако для этого еще недостаточно, чтобы
последующее фазочувствительное устройство в принципе могло отсеивать слагаемое с множителем sinw0t. Необходимо, чтобы это можно было реализовать технически, для чего нужна относительная малость слагаемого с sinw0t по сравнению со слагаемым с cosw0t. Только в этих условиях при имеющейся всегда нестабильности фазочувствительного устройства может быть уверенно, выделено слагаемое с множителем cosw0t.
В качестве примера, иллюстрирующего случай, когда формула (4.81) практически неприменима, рассмотрим опять дифференцирующую RС-цепь (рис. 4.24, а). Примем для простоты, что ее частотная передаточная функция соответствует идеальному дифференцирующему звену W ( jw) = kjw . Тогда, в соответствии с формулой (4.81),
частотная передаточная функция для огибающей будет
Wэ ( jΩ) = |
kj(Ω + w0 ) + kj(Ω − w0 ) |
= kjΩ |
|
||
2 |
|
|
Это выражение показывает, что звено обладает дифференцирующими свойствами и для огибающей. Действительно, если обратиться к формуле (4.72), то видно, что при устранении слагаемого с множителем sinw0t звено будет обладать дифференцирующими свойствами. Однако, как уже указывалось выше при анализе выражения (4.72), его второе (вредное) слагаемое может в сотни и тысячи раз превышать первое (полезное)
слагаемое. Выделить первое слагаемое |
и отсеять второе |
практически |
не, удается. |
||
Поэтому |
обычная |
дифференцирующая RС-цепь не может применяться для |
|||
дифференцирования огибающей. |
|
|
|
||
|
|
|
|
. |
|
Пользоваться формулами (4.81) и (4.82) можно тем уверенней, чем большую |
|||||
симметрию |
относительно |
несущей |
частоты будет иметь частотная передаточная |
||
функция звена |
W(jw). При |
полной симметрии слагаемое с |
множителем |
sinw0t в |
|
выражении (4.75) будет отсутствовать и формула (4.81) вырождается в формулу (4.77). В рассмотренном примере дифференцирующей RС-цепи частотная передаточная функция обладает сильной несимметрией относительно несущей частоты, что и привело к отрицательному результату.
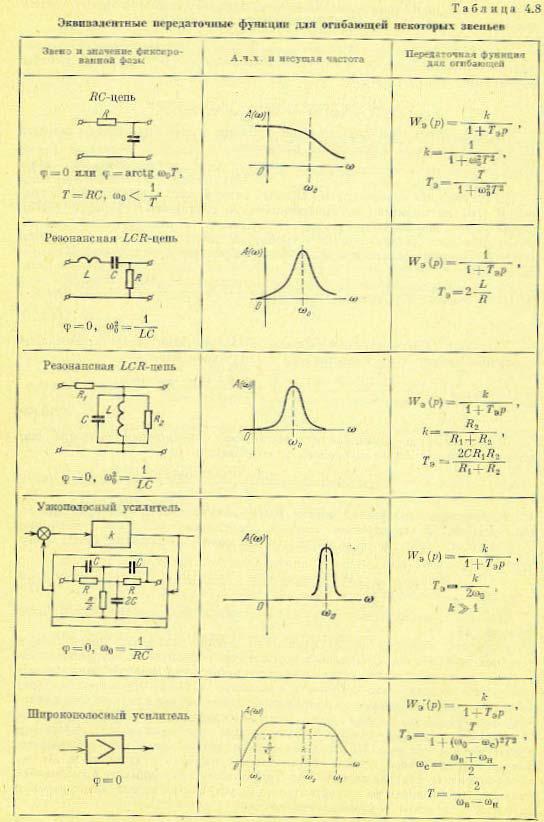
В табл. 4.8 приведены приближенные значения передаточных функций для некоторых звеньев с модулированным сигналом, используемых в практике и сводящихся для огибающей к апериодическому звену первого порядка. Параметры передаточных функций определены для фиксированной фазы последующего фазочувствительного устройства ϕ = const . Эта фаза может устанавливаться равной нулю (ϕ = 0 ), т. е.
устройство фазируется с входным сигналом звена (4.69). Фазочувствителъное устройство может: фазироваться также с выходным сигналом звена при постоянном входном сигнале вида (4.68). В этом случае ϕ =ϕ0 = const , где ϕ0 — фазовый сдвиг несущей частоты при
входном сигнале u1 =U1max cos w0t . При симметричной относительно несущей частоты частотной передаточной функции соблюдается условие ϕ =ϕ0 = 0 .
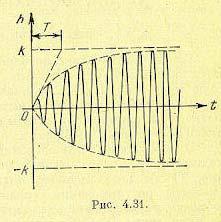
На рис. 4.31 изображена для иллюстрации переходная характеристика звена с модулированным сигналом, эквивалентная для огибающей апериодическому звену первого порядка.

ГЛАВА 5
СОСТАВЛЕНИЕ ИСХОДНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
§ 5.1. Общий метод составления исходных уравнений
Системы автоматического регулирования в большинстве случаев являются сложными устройствами, динамика которых описывается совокупностью дифференциальных уравнений. Для получения этой совокупности необходимо составить дифференциальное уравнение для каждого элемента автоматической системы так, чтобы общее число уравнений было не меньше, чем число независимых обобщенных координат, определяющих состояние системы.
При составлении дифференциального уравнения каждого элемента необходимо прежде всего выявить физический закон, определяющий его поведение. Таким законом может быть, например, закон сохранения вещества (объекты регулирования уровня, давления), закон сохранения энергии (объекты регулирования температуры), закон равновесия моментов (объекты регулирования скорости или угла поворота), закон равновесия электродвижущих сил (электрические цепи) и другие основные законы физики. Математическое выражение соответствующего физического закона и является исходным дифференциальным уравнением данного элемента автоматической системы. Например, для электродвигателя закон равновесия моментов на его валу может быть записан в следующем виде:
J ddtΩ = M В − MТ
где J и Ω — приведенный момент инерции и угловая скорость двигателя, Mв — вращающий момент двигателя, Mт — тормозной момент внешних сил (момент нагрузки). После записи дифференциального уравнения необходимо определить факторы, от которых зависят переменные, входящие в это уравнение.
Для приведенного выше примера необходимо установить, от каких величин зависят и какими выражениями определяются вращающий момент двигателя Мв и тормозной момент Мт на его валу. Нужно также выяснить, является ли приведенный момент инерции постоянной величиной или он изменяется в функции какой-либо переменной (например, в функции угла поворота двигателя).
Дальнейшим шагом является линеаризация полученных уравнений в соответствии с главой 3, если линеаризация вообще является допустимой. Обычно линеаризация допустима, если отсутствуют разрывные, неоднозначные или резко изгибающиеся характеристики и уравнения справедливы в течение всего интервала времени регулирования.
В результате линеаризации получается совокупность дифференциальных уравнений, описывающих движение рассматриваемой системы. Введя алгебраизированный оператор
дифференцирования p = |
d |
|
, |
эту |
совокупность можно представить в виде |
||||||||||||||||
dt |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a |
11 |
( p)x |
+ a |
12 |
( p)x |
2 |
+.... + a |
1k |
|
( p)x |
k |
= f |
1 |
(t) |
|
||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
a21 ( p)x1 + a |
22 ( p)x2 |
+.... + a2k ( p)xk |
= f |
2 (t) |
(5.1) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
..................................................................... |
|
||||||||||||||||||||
a |
k1 |
( p)x |
+ a |
2k |
( p)x |
+.... + a |
kk |
( p)x |
= f |
k |
(t) |
|
|||||||||
|
1 |
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|||||||
где x1, х2, . . ., хk — обобщенные координаты системы, в том числе и регулируемая величина у (t) и ошибка х (t), а. f1 (t),f2(t), ...,fk(t) — функции времени, представляющие собой задающие и возмущающие воздействия. В дальнейшем без потери общности

рассуждений будем считать, что к системе приложены только два воздействия — задающее воздействие g(t) и возмущающее воздействие f(t). Например, можно полонить, что f1(t) = g(t), а f2(t)=f(t). Кроме того, в (5.1) введены некоторые полиномы aij от оператора р.
Совокупность (5.1) может быть решена относительно любой обобщенной координаты. Обычно она решается либо относительно отклонения регулируемой величины от заданного значения, т. е. ошибки х(t), либо относительно регулируемой величины у(t). Первый случай встречается чаще, так как исследование изменения ошибки, как правило, является более важным. В этом случае получается дифференциальное уравнение
D( p)x(t) = Q( p)g(t) + N( p) f (t) (5.2)
Полином D(р) степени n от оператора p = dtd характеризует свободное движение
регулируемого объекта с регулятором. Он называется характеристическим полиномом и может быть представлен в виде
D( p) = a |
0 |
pn + a pn−1 |
+.... + a |
n−1 |
p + a |
n |
(5.3) |
|
1 |
|
|
|
где а0, . . ., аn в линеаризованной системе представляют собой постоянные коэффициенты. Полином Q(р) той же степени
Q( p) = c |
0 |
pn + c pn−1 |
+.... + c |
n−1 |
p + c |
n |
(5.4) |
|
1 |
|
|
|
где с0, . . ., сn — постоянные коэффициенты, определяют влияние задающего воздействия g(t) на характер изменения ошибки х(t). Под задающим воздействием g(t) здесь понимается требуемый закон изменения регулируемой величины у(t). Выражение Q(р)g(t) не равно нулю только в случае программного регулирования и в следящих системах. В системах автоматической стабилизации g(t)= соnst. Поэтому всегда можно выбрать начало отсчета так, чтобы g(t)=0, что упрощает выражение (5.2).
Полином N(р) определяет влияние возмущающего воздействия f(t) на характер изменения ошибки х(t). В уравнении (5.2) учтено одно возмущение f(t), действующее на систему регулирования. В принципе таких возмущений может быть несколько. Однако вследствие линейности действует принцип суперпозиции и достаточно рассмотреть методику учета только одного возмущения; при наличии нескольких возмущений необходимо лишь просуммировать результат. Если для какого-либо возмущающего воздействия fк (t) ≠ 0
полином Nk(p) = 0, то говорят, что система автоматического регулирования является инвариантной относительно этого воздействия.
Равным образом в системах программного регулирования и в следящих системах равенство Q(р) = 0 означает, что система является инвариантной относительно задающего воздействия.
Из (5.2) вытекает, что ошибка системы автоматического регулирования может быть представлена в виде суммы двух составляющих. Первая составляющая определяется наличием задающего воздействия g(t). Вторая составляющая определяется наличием возмущающего воздействия (в общем случае— возмущающих воздействий или начальных условий). В системах автоматической стабилизации ошибка сводится только ко второй составляющей, т. е. определяется только наличием возмущающих воздействий. При решении системы дифференциальных уравнений относительно регулируемой величины у(t) получается так называемое уравнение движения регулируемого объекта при наличии автоматического регулирования.
Это уравнение может быть получено в результате подстановки выражения для ошибки х x(t)=g(t)-y(t) в уравнение (5.2):
D( p) y(t) = Q( p)g(t) − N( p) f (t) R(t) = D( p) −Q( p)
Степень этого полинома m ≤ n :
R( p) = b0 pm +b1 pm−1 +.... +bm−1 p
(5.5)
+bm