

2007-uch-posob-vargapetyan-1
.pdfТаблица 3.2. Классификация ЯИМ
Название |
|
Тип ЭВМ, транслятор |
Примечания |
|
|
|
|
|
|
Дискретные модели |
|
|
|
|
|
GPSS/PC |
|
PC |
Интерактивная графи |
GPSS/H |
|
PC |
ка и анимация |
|
Версия системы GPSS |
||
SIMSCRIPT II.5 |
|
PC, MF |
для ПЭВМ |
|
Параметрическое моде |
||
SIMULA |
|
PC, MF |
лирование |
SIMULAP |
|
PC, MS DOS, Windows |
|
MIC SIM |
|
PC, PS/2 |
Графика и анимация |
OPTIC |
|
PC |
|
PC SOL 4.0 |
|
PC, Паскаль 4.0 |
|
|
|
|
|
|
|
Непрерывные модели |
|
|
|
|
|
DYNAMO III /F+/ 370 |
MF, Фортран |
Нелинейные модели |
|
MicroDYNAMO |
|
РС, 16 разрядные, РС |
|
MiniDYNAMO |
|
|
|
ProDYNAMO+ |
|
|
Дополнительные воз |
CSSL IV |
|
РС |
|
ISIM |
|
PC, MF |
можности оптимизации |
OPT ISIM |
|
Фортран 77 |
моделируемых систем |
SYSL/M |
|
РС, Фортран |
|
ACSL |
|
РС, Фортран |
|
|
|
|
|
|
|
Сетевые модели |
|
|
|
|
|
SIMNET |
|
PC, Фортран 77 |
– |
Network II.5 |
|
PC, MF, VAX |
|
BEST NETWORK |
|
MF, Фортран |
|
|
|
|
|
|
НепрерывноJдискретные модели |
||
|
|
|
|
SLAM II |
|
MF, Фортран |
Kомбинированные мо |
SLAM II/PC |
|
PC |
дели дискретного, не |
|
|
|
прерывного и сетевого |
|
|
|
типа |
MicroPASSIM |
|
PC, Паскаль |
Расширенные возмож |
PASION |
|
PC, Паскаль |
ности статистического |
SIMAN + Cinema |
|
PC, Фортран 77 |
анализа; ориентация на |
|
|
|
производственные сис |
|
|
|
темы; интерактивная |
|
|
|
графика и анимация |
|
|
|
|
|
Динамические системы (ДС) |
||
|
|
|
|
ENPORT 7 |
|
MF, Фортран |
Нелинейные ДС |
TSIM |
|
VAX |
|
LSMP |
|
PC |
Линейные ДС |
DSL/VS |
|
MF, Фортран, Форт |
|
|
|
ран 77, ПЛ /1 |
|
|
|
|
|
41
Продолжение табл. 3.2
Название |
|
Тип ЭВМ, транслятор |
Примечания |
|
|
|
|
Системы реального времени |
|||
|
|
|
|
NET Real Time |
|
PC |
Ориентация на модели |
|
|
|
рование автоматизиро |
|
|
|
ванных производств |
DATE INTER ACTIVE |
|
VAX |
Непрерывные модели; |
|
|
|
интерактивная графика |
|
|
|
|
|
Системы, ориентированные |
||
на производственные процессы и контроль качества |
|||
|
|
|
|
GEMS II |
|
PC, Фортран 77 |
Сетевые модели |
MAST |
|
PC, Фортран 77 |
Анализ производствен |
SIMPLE |
|
PC |
ных процессов |
SPAR |
|
PC |
Оценка возможности |
|
|
|
роста производства |
XCELL+ |
|
РС |
Быстрое построение |
|
|
|
прототипов производст |
|
|
|
венных систем средст |
|
|
|
вами интерактивной |
|
|
|
графики |
SIMIS III |
|
PC, MF |
Моделирование произ |
|
|
|
водственных и матери |
|
|
|
альных потоков |
Process Quality Simu |
|
РС |
Моделирование систем |
lator |
|
|
управления качеством |
|
|
|
продукции |
|
|
|
|
Системы моделирования экономических процессов |
|||
|
|
|
|
LIBRA |
|
PC |
Построение моделей |
|
|
|
равновесия экономиче |
|
|
|
ских систем |
MULTISIM |
|
DEC 20, Simula |
Многоуровневые моде |
|
|
|
ли рынка |
|
|
|
|
Моделирование вычислительных и коммутационных систем (KС) |
|||
|
|
|
|
CIRCUITS |
|
Macintosh |
Моделирование мощных |
|
|
|
вычислительных сис |
|
|
|
тем; интерактивная |
|
|
|
графика |
|
|
|
|
Моделирование робототехнических систем |
|||
|
|
|
|
ROSCAD |
|
Silicon, Sun |
Графическое моделиро |
ROSY |
|
VAX |
вание в реальном вре |
|
|
|
мени |
|
|
|
|
42
Окончание табл. 3.2
Название |
Тип ЭВМ, транслятор |
Примечания |
|
|
|
Системы статистического моделирования и обработки данных |
||
|
|
|
СТАТМОД |
РС |
Статистическое модели |
|
|
рование случайных ве |
|
|
личин, векторов, про |
|
|
цессов |
СТАН |
РС |
Статистический анализ |
|
|
результатов экспери |
|
|
ментов |
|
|
|
особенности или возможности систем (в графе «Примечания»). По своему назначению системы разбиты на разделы. Первые четыре раз дела включают ЯИМ общего назначения, ориентированные на опре деленный тип модели. В последующих разделах системы объедине ны по типу предметной области либо условиям применения.
Таблицы 3.1, 3.2 дают общее представление о системном мире ЯИМ, однако существуют принципы, одинаковые для всех типов моделей:
—понятие о модельном времени;
—структура процесса и способы представления параллельно про исходящих в реальной системе событий в виде квазипараллельных событий при реализации на компьютере;
—генерирование базовых случайных величин (чисел, векторов, процессов).
Все упомянутые принципы будут рассмотрены в последующих па раграфах настоящей главы.
§ 3.2. МОДЕЛЬНОЕ ВРЕМЯ
Как уже упоминалось (§ 1.5), содержание любой задачи ИМ полу чается в результате реализации прогона или ряда прогонов модель ного файла, получения и обработки собранной статистики и приня тия решений на основе статистического анализа. Длительность ис пытаний зависит либо от заданной статистической точности, либо от заданного числа реплик в одном прогоне, либо от времени рассмот рения функционирования реальной системы (см. гл. 8). В связи со сказанным необходимо четко понимать, какие времена рассматрива ются при ИМ, и представлять их различие.
• Тр — реальное время функционирования исследуемой системы S, которое может быть очень большим, например, 10n лет при иссле
43
довании космогонических процессов, либо, наоборот, очень малым — 10–n с при исследовании процессов, происходящих в микромире.
•Ти — машинное время имитации, отражающее затраты ресурса времени ЭВМ на организацию ИМ. В случае использования супер компьютеров, производительность которых превышает сотни гига флоп, минута машинного времени может стоить несколько тысяч дол ларов. Это ограничение должно учитываться создателями ИМ и да лее не рассматривается.
•Тм — модельное время (МВ), используемое в ИМ. Оно может быть сжато при исследовании процессов макромира или растянуто при опе рировании со сверхбыстрыми процессами в реальной системе. Кроме того, именно МВ позволяет избежать сложностей моделирования по ведения реальной системы. Так, в реальной системе события могут происходить одновременно в разных компонентах системы; в обыч ных, не мультипроцессорных, ЭВМ параллельные события вопло тить нельзя. Модельное время позволяет синхронизовать все собы тия и реализовать квазипараллелизм (см. § 3.2). При создании ИМ задание временной дискреты модельного времени является обязатель ным условием до начала процесса ИМ. Естественно, что разные зна( чения времени процессов обязательно должны быть выражены в едином масштабе временной дискреты модельного времени. Так, например, если временная дискрета задана в минутах, другие вре менные периоды: часы, сутки, годы — должны быть также представ лены в минутах.
Введем обозначение временного интервала моделирования систе мы S (интервала МВ)
τ =[t0,Ti ],
где t0 — время начала моделирования (обычно полагают t0 = 0); Тм — время окончания моделирования; t τ— текущее значение МВ.
Построение модели системы S начинается с определения парамет ров системы и переменных, определяющих процесс функционирова ния системы.
1. Параметры системы θ1, θ2, …, θm — это характеристики сис темы, остающиеся постоянными на всем интервале моделирования τ. Если значения {θi} определены на некотором множестве Θ
θ =(θ1...θm ) Θ Rm,
то говорят, что имеется параметрическое семейство систем.
2. Множество переменных разбивают на два подмножества — независимых и зависимых переменных.
44
К независимым переменным отнесем следующие характери стики.
• Входные воздействия на систему (сигналы) u1, u2, …, un1. Вход ные воздействия в момент t Т характеризуются вектором
u = u(t) = (u1(t),…, un1(t)) U Rn1.
Среди {ui} могут быть управляющие воздействия, например u1, u2,…, un1′ (n1′ ≤ n1), а остальные n1 – n1′ воздействий — неуправляю щие.
•Воздействия внешней среды: среди них могут быть контролиру
емые (наблюдаемые) и неконтролируемые (ненаблюдаемые), детер минированные и случайные воздействия. В момент t Т они характе ризуются вектором
v = v(t) = (v1(t),…,vn2(t)) V Rn2.
•Переменные, характеризующие состояние системы: x1, x2, …, xn3. В отличие от {θi} состояния {xi} характеризуют свойства систе мы, изменяющиеся во времени. Состояние системы в момент време ни t Т описывается вектором
x = x(t) = (x1(t), …, xn3(t)) X Rn3,
где X — пространство состояний или фазовое пространство системы (множество возможных значений вектора х). Если t1< t2 <… — мо менты изменения состояния системы, то последовательность x(t1), x(t2),… называется фазовой траекторией системы.
К зависимым переменным отнесем следующие характеристики.
• Выходные характеристики (сигналы) системы у1, у2, ..., уn1,оп ределяемые в момент времени t T вектором
y= y(t)= (y1(t), …, yn4(t)) Y Rn4.
•Выходные показатели системы q1, q2, …, qk характеризуют ее цели (т. е. характеризуют достижение системой заданных или оптималь ных величин) и образуют вектор
q = q(t) = (q1(t),…, qk(t)) Q Rk, t τ.
Выходные показатели представляются в виде некоторых функци оналов
q = q(t) = q1(t) = (q1(t),..., qk (t)) Q Rk, tτ.
При наличии в системе случайных факторов (например, случай ных воздействий внешней среды) значения {qi} являются также слу
45

чайными, при этом в качестве Q используют средние значения {Qi}, определяемые соотношениями
Qi = E{ qi} , i =1,k,
где E{.} — символ математического ожидания.
Связи между зависимыми и независимыми переменными показа ны на рис. 3.1.
Процесс функционирования системы во времени описывается опе( раторными соотношениями (заданными аналитически или алгорит мически) для состояний и выходных характеристик системы:
x(t) = F (u(t), v(t), θ, t); |
|
1 |
|
y(t) = F (u(t), v(t), x(t), θ, t); |
|
2 |
|
q(t) = F3 (u(t), v(t), x(t), y(t)θ, t), t τ, |
(3.1) |
где u(t) обозначают реализацию процесса u(t) на отрезке [0, t], анало гично обозначены x(t), y(t); F1( ), F2 ( ), F3 ( ) обозначают соответствую щие операторы, описывающие динамику зависимых и независимых переменных и показателей эффективности.
Зависимости (3.1) называются законами функционирования си( стемы S; зависимость y = y(t), t τ называется выходной траекто( рией системы, а зависимость x = x(t), t τ — фазовой траекторией.
Под фазовой траекторией будем понимать отображение движения системы из одного состояния фазового пространства в другое в каж дый момент МВ. В общем случае фазовое пространство при N компо нентах системы S характеризуется 3N координатами и 3N импуль сами, т. е. имеет размерность 6N, что не изобразить графически. Про стейшим случаем фазового пространства является фазоваяплоскость.
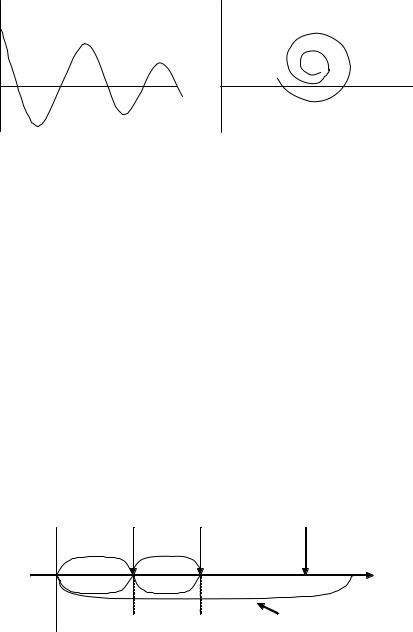
Например, для маятника с трением имеем уравнение
d2x/dt2 +η/m dx/dt + k/mx = 0, |
(3.2) |
||
|
v(t) |
|
|
|
|
y(t) |
|
|
|
|
|
u(t) |
S |
Q (t) |
|
|
Θ, x(t) |
|
|
|
|
|
|
Рис. 3.1. Связь между переменными
46
x |
px |
T
x
Рис. 3.2. Зависимость координаты |
Рис. 3.3. Фазовая траектория |
где x — координата; η— сила вязкого трения; m — масса маятника; k — жесткость.
Решением этого уравнения являются затухающие колебания. За висимость координаты от времени приведена на рис. 3.2, а на рис. 3.3 — фазовая траектория в виде спирали, имеющая аттрак( тором (устойчивым состоянием) фокус в нуле.
Сделаем важное замечание, которое используется при моделиро вании: процесс моделирования всегда начинается в момент времени 0.0 или после точки 0.0. Если операндом С ОБ GENERATE задано смещение, то начало координат перемещается из точки 0.0 в точку, заданную операндом С.
Прежде чем дать описание способов представления модельного времени, рассмотрим взаимосвязь таких компонентов ИМ, как собы( тие A (ji), действие dj(i), локальное модельное время τ(ji) (ЛМВ) и про( цесс. Под событием будем понимать изменение фазового состояния системы при совершении каких то действий в течение локального момента времени.
В реальной системе процесс функционирования происходит в ре альном времени, в модели — в течение МВ Тм. На рис. 3.4 показана взаимосвязь компонентов ИМ [4].
A1(i) |
A(i) |
A(i) |
|
2 |
n |
d(i) |
d(i) |
|
1 |
2 |
|
0 |
|
Тм |
τ(i) |
τ(i) |
Процесс |
|
||
1 |
2 |
|
Рис. 3.4. Взаимосвязь компонентов ИМ
47
Очевидно, что возможны три способа изменения вектора состоя ний x(t) системы S:
1)в моменты наступления событий {A (ji)};
2)в результате выполнения действий {dj(i)}, на что требуются зат раты МВ {τj(i)}. Пара {dj(i); τj(i)} называется (i, j) активностью (Р. Шен нон определил это сочетание как «работа»);
3)в результате выполнения хронологической последовательнос ти событий и действий, называемых процессом.
Для осуществления изменения состояния системы одним из ука занных способов необходимо каким то образом управлять измене нием МВ.
Существуют два способа формирования конечного множества мо
ментов времени Тм, известных как принципы организации измене ния МВ t и x.
Принцип |
t заключается в изменении MB с фиксированным ша |
гом t. |
|
Принцип |
x заключается в изменении MB при скачкообразном |
изменении вектора состояния х системы S на некоторую величину x ( x ≠ 0).
Для моментов времени t* из множества Тм, сформированного по
принципу x, справедливо |
|
x(t* + 0) = х(t*) + x, t* Т. |
(3.3) |
Для моментов времени из множества [0, T]\Тм вектор состояний изменяется непрерывно (либо остается неизменным).
Заметим, что скачкообразные изменения состояния системы S происходят при наступлении таких «особых» событий, как поступ ление управляющих сигналов и внешних воздействий, выдача вы ходных сигналов и т. п.
Приведем более строгое описание принципов t и x и поясним их особенности. Пусть система S состоит из N элементов: A(1), ..., А(N), поведение которых предполагается моделировать:
S ={A(1), ..., А(N))}.
Для каждого элемента А(i) S (i = 1, ..., N) определим ЛМВ t(i) [0, Tм]. Поведение элемента А(i) S в течение интервала моделирования определяется некоторой последовательностью действий
g1(i), g2(i),..., gM(i), gj(i) G, j =1, ..., Mi,
где G — множество всевозможных действий для элементов S. На мно жестве G будем выделять подмножество действий D: D G, для вы
48
полнения которых в ИМ требуется некоторое ненулевое модельное время.
Будем |
|
обозначать такие действия |
d(i),..., d(i) (d(i) D G, |
|||||||
|
|
|
|
|
|
|
|
1 |
m |
j |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
l |
|
j =1,m , m ≤ M , i =1,N), а интервалы МВ, затрачиваемые на выпол |
||||||||||
|
i |
i |
i |
|
|
|
||||
нение этих действий, соответственно, τ(i),..., τ(i) . Последователь |
||||||||||
|
|
|
|
|
|
1 |
m |
|
|
|
ность {τ(i) |
|
|
|
|
|
i |
|
|
||
} (j =1,m ) является последовательностью случайных ве |
||||||||||
|
|
j |
|
|
i |
|
i = 1,N. |
|||
личин с заданными законами распределения L{τ(ji) }, |
||||||||||
Действия {d(i) } D приводят к наступлению в системе S особых |
||||||||||
|
|
|
|
|
j |
|
|
|
||
событий {A(i) } . События |
{C(i) } , к которым приводят действия |
|||
j |
|
j |
|
|
{gj(i) } :{gj(i) } G/D, не требующие затрат MB, считаются неособыми. |
||||
Момент ЛМВ наступления события A(i) для A |
S определяется |
|||
|
|
j |
i |
|
по формуле |
|
|
|
|
t(i) = t + τ(i), j =1, 2, ..., i =1,..., N, |
(3.4) |
|||
j |
j |
|
|
|
где t — текущее значение MB; τ(ji) имитируется на ЭВМ в соответствии
с законом распределения L{τ(ji) }.
Состояние системы S в момент времени t [0, Тм] определяется вектором состояния x(t) X Rn. Состояния системы в моменты наступления особых событий будем называть особыми состояния( ми, а состояние x(0) — начальным состоянием системы.
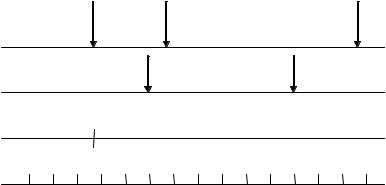
Для иллюстрации принципов t и x используем временную диаг рамму (рис. 3.5).
Описание временной диаграммы.
Пусть число моделируемых элементов в S равно 2, т. е. N = 2, и
S = {A(1), A(2)}.
|
|
|
A1(2) |
|
|
|
|
A(2) |
|
|
|
|
|
|
|
A |
(2) |
t |
(2) |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
A(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A(1) |
|
|
|
|
|
|
|
(1) |
|
|
t |
(1) |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
A(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
x |
|
|
|
t1(2) |
|
t(1) |
|
|
t(2) |
|
|
|
|
t2(1) |
|
|
t3(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
|
||||
Рис. 3.5. Временная диаграмма
49
Временная диаграмма включает:
—временную ось ЛМВ t(1) для элемента А(1);
—временную ось ЛМВ t(2) для элемента А(2);
— временную ось модельного времени по принципу |
x; |
|||||||
— временную ось модельного времени по принципу |
t. |
|||||||
Временные оси будем помечать символами А(1), А(2), |
t, x. |
|||||||
|
Пусть в течение рассматриваемого интервала моделирования |
|||||||
[0, Т |
м |
] для элемента А(1) произошло 2 события: A(1) |
, A(1) |
в моменты |
||||
t(1) |
|
|
|
1 |
|
2 |
|
|
, t(1) |
, для элемента A(2) — 3 события: A(2) |
, A(2), A(2) |
в моменты |
|||||
1 |
|
2 |
1 |
2 |
3 |
|
|
|
t(2) |
, t(2) |
, t(2). |
|
|
|
|
||
1 |
|
2 |
3 |
|
|
|
|
|
Предположим, что хронологическая последовательность событий такова:
0 ≤t1(2) <t1(1) <t2(2) <t2(1) <t3(2) ≤T.
Принцип t.
В соответствии с принципом t изменение модельного времени t происходит через промежутки времени, равные t, т. е. t в течение времени моделирования Т принимает конечное множество значений:
Ta ={0, t, 2 t,..., v t =T}.
При этом событиям, которые попадают в интервал постоянства MB δr = ((r – 1) t, r t), r =1, v, в ИМ присваивается один и тот же момент наступления: t = r t. Выбор величины t существенно влияет как на быстродействие ИМ, так и на точность аппроксимации систе мы S c помощью ИМ. Пусть t выбран таким, как указано на диаг рамме (см. рис. 3.5), т. е. моменты наступления событий в S принад лежат следующим интервалам:
t1(1), t2(2) δ6, t2(1) δ10, t3(2) δ15.
Это означает, что соответствующим событиям в ИМ будут присво ены следующие моменты наступления:
А1(2) ~ 3 t, A1(1), A2(2) ~ 6 t, A2(1) ~10 t, A3(2) ~15 t.
При этом фазовая траектория системы S с вектором состояний x(t) X будет иметь вид
х(0), x( t) = x(2 t) = x(0), x(3 t) = х(t1(2)), x(4 t) = x(5 t) = x(3 t), x(6 t) = х(t2(2)), x(7 t) = x(8 t) = x(9 t) = (6 t), x(10 t) = x(t2(1)), x(11 t) = ... =x(14 t) = x(10 t), x(15 t) = x(t3(2)).
50