

розділ2
.pdfДисципліна «Автоматика»
Відносною похибкою  називають відношення абсолютної погрішності У до розрахункового значення вихідного сигналу У. Відносна похибка
називають відношення абсолютної погрішності У до розрахункового значення вихідного сигналу У. Відносна похибка
виражається у відсотках.
== УУ 100%.
Приведеною відносною похибкою  називають відношення абсолютної погрішності У до максимального значення вихідного сигналу Умакс, що визначає діапазон його зміни. Приведена похибка теж виражається у відсотках.
називають відношення абсолютної погрішності У до максимального значення вихідного сигналу Умакс, що визначає діапазон його зміни. Приведена похибка теж виражається у відсотках.
= У 100%
Умакс
4. Зв'язки, які створюють шлях передачі дій між елементами системи автоматичного регулювання, називаються головними зв'язками. При порушенні якого-небудь одного з головних зв'язків регулююча дія всієї системи припиняється. Як головні зв'язки зазвичай застосовуються важелі, редукторні і зубчасті передачі, електричні провода і кабелі, гідравлічні і пневматичні передачі.
Зв'язки направлені від регулятора до об'єкту регулювання, називаються прямими зв'язками; зв'язки між вимірювальним органом і регулятором називаються головними зворотними зв'язками.
Зворотний зв'язок утворюється у тому випадку, коли частина вихідного сигналу елемента подається на його вхід, тобто направлена протилежно ходу регулюючої дії. У більш складних системах регулювання, окрім головних зворотних зв'язків, застосовуються допоміжні (додаткові) зворотні зв'язки, звані просто «зворотні зв'язки».
Зворотним зв'язком називається такий пристрій, за допомогою якого частина вихідної величини подальшої ланки передається на вхід попередньої ланки, проти ходу ланцюжка ланок регулювання. Додаткові зворотні зв'язки зв'язують вихід якої-небудь окремої ланки з його входом або вихід якої-небудь подальшої ланки з входом будь-якого попередньої.
Основне призначення зворотного зв'язку – зміна властивостей окремої ланки або групи ланок, поліпшити якість регулювання і зробити перехідний процес стійким або, як прийнято говорити, стабілізувати систему. В АСР зворотний зв'язок частіше за все здійснюється між виходом виконавчого пристрою і входом підсилювача.
Зворотні зв'язки за методом їх приєднання поділяються на позитивні і негативні. Позитивним називається такий зворотний зв'язок, сигнал якого вводиться в ланку з тим же знаком, що і поступає по основному ланцюгу вхідна величина. Негативним називається такий зворотний зв'язок, сигнал якого вводитися в ланку із знаком, протилежним знаку вхідної величини, що поступає по основному ланцюгу. Сутність введення позитивного зворотного зв'язку полягає у збільшенні коефіцієнта посилення ланки. Сутність введення негативного зворотного зв'язку полягає у зменшенні інерційності ланки, у
Розділ 2. «Елементи автоматики»
поліпшенні стійкості, в подавленні коливань, у зміні типу ланки. Тому в техніці автоматичного регулювання найширше застосування знаходить негативний зворотний зв'язок.
Негативні зворотні зв'язки, вживані в системах автоматичного регулювання, діляться на жорсткі і гнучкі
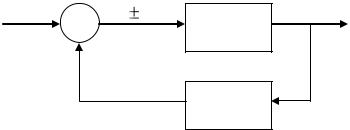
На рисунку 2.1.7 показаний основний елемент, який охоплений зворотним зв'язком. Основний елемент має коефіцієнт перетворення К. Зворотний зв'язок в схемі здійснюється за допомогою додаткового елемента зворотного зв'язку, що має коефіцієнт перетворення Кзз.
Х |
Х Хо |
У |
К
Хо
Кзз
Рисунок 2.1.7
На вхід елемента подається сигнал Х, а на виході елемента утворюється сигнал У. Частина вихідного сигналу Хо подається на вхід елемента. Якщо сигнал Хо співпадає по фазі з вхідним сигналом Х, то утворюється позитивний зворотний зв'язок, при цьому на вхід основного елемента поступає сигнал Х + Хо. Якщо сигнал Хо не співпадає по фазі з вхідним сигналом Х, то утворюється негативний зворотний зв'язок і на вхід основного елемента поступає сигнал Х – Хо.
Позитивний зворотний зв'язок збільшує коефіцієнт перетворення елемента, але зменшує стабільність роботи елемента. Негативний зворотний зв'язок зменшує коефіцієнт перетворення, але збільшує стабільність роботи елемента.
Дисципліна «Автоматика»
2.2 ДАТЧИКИ.
2.2.1Загальні відомості про датчики. Параметричні омічні перетворювачі.
1.Загальні відомості про датчики і їх загальні характеристики.
2.Класифікація датчиків.
3.Пристрій, принцип дії омічних датчиків.
А) Потенціометричні датчики. Б) Тензодатчики.
В) Терморезистори. Г) Фоторезистори
1. Вимірювальним перетворювачем (датчиком) називається чутливий елемент автоматичної системи, призначений для перетворення величини (параметра), що виміряється або регулюється, у вихідний сигнал (величину) у формі зручній для подальшої обробки, передачі і зберігання.
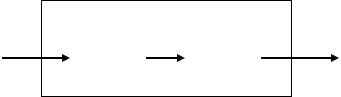
В загальному вигляді датчик Д (рис.2.2.1) можна представити у вигляді чутливого елемента ЧЕ і перетворювача ПР. Чутливий елемент в системах автоматики і телемеханіки виконує функції "органів чуття" Він призначений для перетворення контрольованої величини Х у такий вид сигналу Х1, який зручний для вимірювання. У перетворювачі, як правило, відбувається перетворення неелектричного сигналу Х1 в електричний сигнал У.
Х |
|
Х1 |
|
У |
|
ЧЕ |
ПР |
||||
|
|
|
|||
|
|
|
|
|
Рисунок 2.2.1
На вхід датчика можуть поступати як електричні, так і неелектричні сигнали. З виходу датчика звичайно одержують електричні сигнали. Це викликано тим, що електричні сигнали простіше підсилювати і передавати на різні відстані.
Загальними характеристиками датчиків є:
-статична характеристика;
-інерційність;
-динамічна (диференціальна) чутливість;
-поріг чутливості, похибка;
-потужність, момент або зусилля, що вимагається від джерела вхідного сигналу;
-вихідна потужність і вихідний опір датчика.
Розглянемо деякі із загальних характеристик датчиків.
Розділ 2. «Елементи автоматики»
Статична характеристика показує залежність вихідної величини У від вхідної величини Х, тобто У = f (Х) (Х – контрольований або регульований параметр, діючий на датчик; У – параметр, отриманий після перетворення).
Інерційність характеризується відставанням змін вихідної величини У від змін вхідної величини Х. Вона приводить до похибки при зміні вхідної величини Х і тому є небажаною.
Динамічна (диференціальна) чутливість датчика S або динамічний коефіцієнт перетворення датчика Кдин показує, у скільки разів приріст вихідної величини ( У, dУ) більше приросту вхідної величини ( Х, dХ):
S == |
У |
dY/dX |
|
Х |
|||
|
|
Бажано, щоб динамічна чутливість датчика була якомога більш високою. Перераховані характеристики датчиків можуть визначатися як
розрахунковим, так і експериментальним шляхом.
2. У найпростішому випадку датчик здійснює одне перетворення У = f (Х), наприклад, сили в переміщення або температури в електрорушійну силу і т.п. Такі датчики називають датчиками з безпосереднім (прямим) перетворенням. Проте у ряді випадків прямий зв'язок незручний або не дає бажаного результату. В цьому випадку здійснюють послідовні перетворення: вхідна величина Х впливає на проміжну Z, а величина Z – на необхідну вихідну величину У:
Z = f1 (Х); |
У = f2(Z); |
У = f2 [f1 (Х)] = F (Х) |
В даний час найбільше розповсюдження в автоматиці і телемеханіці отримали електричні датчики, які залежно від принципу дії можна розділити на дві великі групи: параметричні і генераторні (рис. 1.2.2).
Параметричні датчики служать для перетворення неелектричного контрольованого або регульованого параметра в один з параметрів електричному ланцюга (R, С, L). Ці датчики одержують електричну енергію від допоміжного джерела енергії. Параметричні датчики діляться на датчик активного опору (омічні) і реактивного опору (індуктивні і ємнісні).
Генераторні датчики призначені для перетворення неелектричної енергії вхідного сигналу в електричну енергію вихідного сигналу. Ці датчики не потребують стороннього джерела енергії. Генераторні датчики бувають термоелектричними, п'єзоелектричними, фотоелектричними і індукційними.
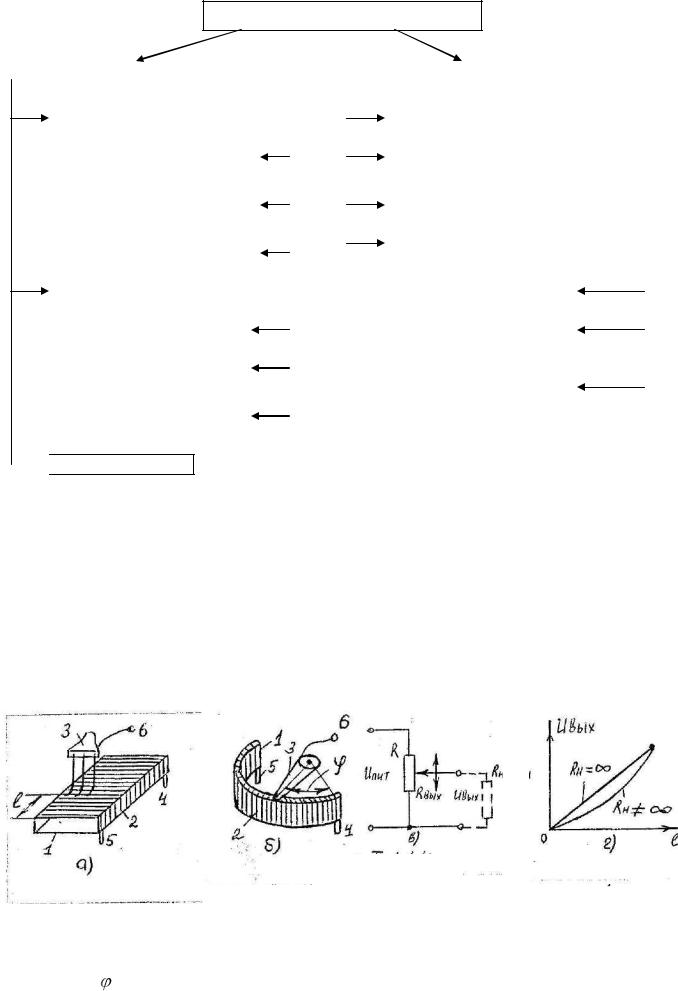
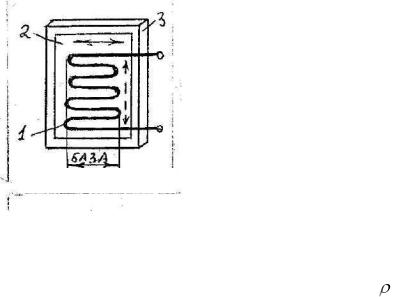
3. А. Потенціометричні датчики застосовуються для перетворення кутових і лінійних переміщень в зміну електричного опору. Конструктивно датчики потенціометрів є каркасом із діелектричного матеріалу прямокутної або кільцевої форми, на який намотаний в один ряд тонкий провід (рис. 1.2.3).
Дисципліна «Автоматика»
ЕЛЕКТРИЧНІ ДАТЧИКИ
|
ПАРАМЕТРИЧНІ |
|
|
|
|
ГЕНЕРАТОРНІ |
|
|
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Омічні |
|
|
|
|
|
|
|
Термоелектричні |
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Потенціометричні |
|
|
|
|
|
П'єзоелектричні |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Тензодатчики |
|
|
|
|
|
Фотоелектричні |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Термоопір |
|
|
|
|
|
Індукційні |
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Індуктивні |
|
|
|
|
|
|
|
Тахогенератори |
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Індуктивні |
|
|
|
|
|
|
Сельсини |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Магнітопружні |
|
|
|
|
|
|
Трансформатори, |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
що обертаються |
|
|
|
|
|
Трансформаторні |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 Ємнісні
Ємнісні
Рисунок 2.2.2
На рисунку 2.2.3,а на прямокутний каркас 1 намотаний провід 2, по витках якого ковзає щітка 3, яку називають рухомим контактом або движком. Движок механічно пов'язаний з об'єктом, переміщення l якого потрібне виміряти. Від кінців намотування і від движка зроблені електричні виводи 4, 5, 6, за допомогою яких датчик включають у схему. При переміщенні щітки від контакту 5 до контакту 4 опір між контактами 5 і 6 змінюється від 0 до R, а між контактами 6 і 4 від R до 0. По зміні цих опорів можна визначити переміщення l .
Рисунок 2.2.3
На рисунку 2.2.3,б показаний потенціометр для перетворення кутових переміщень .
Розділ 2. «Елементи автоматики»
На рисунку 2.2.3,в показана схема потенціометра, а на рисунку 1.2.3,г показана статична характеристика потенціометра.
Для лінійного потенціометра
Uвих = (Uпит / R) Rвих.
При підключенні до датчика навантаження Rн через її шунтуючу дію лінійна залежність вихідної напруги від переміщення движка порушується. Щоб нелінійність була незначною, повинно виконаються умова Rн >> R (у 20 разів і більш). При переміщенні щітки в межах одного витка Rвих не змінюється, що обумовлює зону нечутливості, а при переході з одного витка на іншій Rвих змінюється стрибком. Для зменшення стрибків і зоні нечутливості використовують тонкий провід (діаметром 0,03 – 0,05 мм).
З метою зменшення впливу температури на Rвих застосовується дріт з малим температурним коефіцієнтом опору (ніхром, константан, манганін).
3.Б. Тензорезистори або тензометричні датчики – це чутливий елемент,
у яких електричний опір залежить від механічної деформації. Вони використовуються для вимірювання пружних деформацій (розтягування або стиснення), а також для вимірювання крутяших і згинаючих моментів, які виникають на поверхні різних механічних деталей при механічному навантаженні, як статичному, так і динамічному.
Тензодатчики виготовляють двох основних типів – дротяні і напівпровідникові.
Основним елементом дротяного датчика (рис 2.2.4) є константановий або фехралевий дріт діаметром 0,015 – 0,05 мм, складена у вигляді петлеподібних грат (спіралі) між двома склеєними смужками тонкого паперу або клейонки.
Рисунок 2.2.4
Датчик 1 у папері 2 приклеюється до деталі 3, деформацію яку потрібно виміряти. При розтягуванні, як показано суцільною стрілкою, разом з деталлю розтягуватиметься і дріт. При цьому її довжина збільшиться, а перетин S зменшиться. За рахунок цього її електричний опір R = l / S збільшується. Якщо деформація діє, як показано пунктирною стрілкою, то вона не вимірюється, оскільки дріт на згинах ще більше згинається або розгинається, а її товщина і довжина не зміняється.
Відносні зміни опору тензодатчика

Дисципліна «Автоматика»
R /R = К l / l
де К – коефіцієнт відносної чутливості - постійна величина у межах пружної деформації. Для промислових дротяних тензодатчиков тензочутливість складає 1,7 – 2,9, R = 50 – 2000 Ом, робочий струм до 30 мА, допустима деформація – не більше 0,3 %.
Розроблені також напівпровідникові тензодатчики, у яких чутливість в 5060 разів вище, ніж у дротяних.
3.В. Термоопір (термистори) – це чутливі елементи, у яких електричний опір залежить від температури. Їх виготовляють з металу і напівпровідників.
Металеві термоопори виготовляють з чистих металів (міді і платини) з великим температурним коефіцієнтом опору. Діапазон вимірювання температури складає:
-для ТСП (платинових) – від –200о до +600оС
-для ТСМ (мідних) – від –50о до + 150оС.
Залежність опору від температури металевих термоопорів від температури лінійна
Rt = Rо (1 + (t – tо))
де - температурний коефіцієнт опору, 1/оС; Rо – опір при температурі tо, Ом;
Rt – опір при температурі t, Ом; tо - початкова температура, оС.
Конструкції їх різні – нитки, спіралі, котушки. Металеві термоопори мають один істотний недолік – велику інерційність – від одиниць до десятків секунд.
Напівпровідникові термисторы виготовляються з окислу різних металів (марганцю, міді, нікелю і ін.) Вони мають негативний температурний коефіцієнт опору.
RТ = Rо е В/Т
де В – температурний коефіцієнт матеріалу, К- константа для даного термистора, Т – температура у Кельвінах.
Напівпровідникові термистори у порівнянні з металевими володіють великим температурним коефіцієнтом опору і меншою інерційністю, а також високим внутрішнім опором, що дозволяє при вимірюванні не враховувати опір вимірювальних дротів. Недоліки – вузький діапазон вимірювання температур – (- 50о ÷ +120оС), нелінійність характеристики, великий розкид параметрів.
3.Г. Датчики (фоторезистори) фоторезисторів – це чутливі елементи з напівпровідників, у яких число вільних електронів і електропровідність збільшуються при збільшенні освітленості. Вони виготовляються з сірчистого
Розділ 2. «Елементи автоматики»
свинцю, сірчистого вісмуту і сірчистого кадмію і мають просту конструкцію. Тонкий шар напівпровідникового матеріалу наноситься на прозору пластину, до якої прикріпляються електроди. При підключенні постійної напруги живлення струм між електродами залежатиме від освітленості світлочутливої поверхні. Залежність струму від освітленості називається світловою характеристикою фоторезистора.
2.2.2. Параметричні датчики реактивного опору.
1.Пристрій, принцип дії індуктивних датчиків А) Індуктивні.
Б) Магнітопружні. В) Трансформаторні.
2.Пристрій, принцип дії ємнісних датчиків.
1.Групу індуктивних датчиків складають індуктивні, трансформаторні і магнітопружні датчики
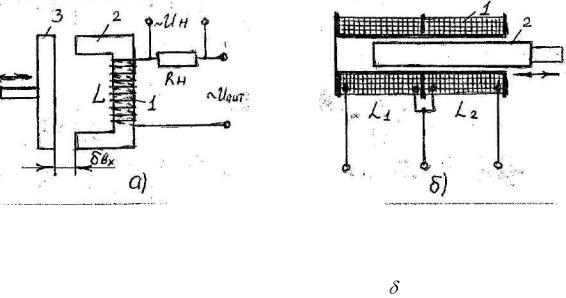
1.А. Принцип дії індуктивних датчиків заснований на зміні індуктивності з магнітопроводом при переміщенні якоря. Конструкції індуктивних датчиків показані на рисунку 2.2.5.
Датчик на рис. 2.2.5,а є котушкою 1 з феромагнітним сердечником 2 і з рухомим якорем 3. При лінійному переміщенні якоря повітряний зазор  змінюється, змінюється і інтенсивність магнітного потоку, а значить і індуктивність L катушки і її повний опір ZL
змінюється, змінюється і інтенсивність магнітного потоку, а значить і індуктивність L катушки і її повний опір ZL
Рисунок 2.2.5
Тоді
UH = IH RH = [Un / (ZL +RH)] RH = F ( )
Слід відмити, що при зменшені довжини зазору  індуктивність обмотки L збільшується, а це у свою чергу приводить до зменшення напруги на навантаженні UH.
індуктивність обмотки L збільшується, а це у свою чергу приводить до зменшення напруги на навантаженні UH.
Переваги: висока чутливість, надійність і довговічність, відсутність контактних пристроїв, простота конструкції і експлуатації. Основним недоліком є нелінійність реальної статичної характеристики
Дисципліна «Автоматика»
Такі датчики використовуються для контролю малих лінійних переміщень
(від 0,001 до 1 мм).
Для контролю великих переміщень (до 50-60 мм) використовуються індуктивні датчики соленоїдного типу (рис. 2.2.5,б).
Тут усередині котушки 1 переміщається рухомий феромагнітний сердечник 2. Для створення вимірювальної схеми від середньої точки котушки зроблено відведення. Коли сердечник знаходиться у центрі котушки, то через симетрію L1=L2. При переміщенні сердечника, наприклад вправо, індуктивність правої половини котушки L2 збільшується, а лівої L1 зменшується. По зміні цих індуктивностей можна виміряти значення переміщення сердечника.
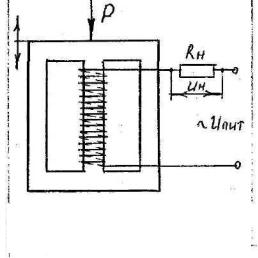
1.Б. Магнітопружні датчики (рис. 2.2.6) відносяться до групи індуктивних датчиків, оскільки принцип їх дії заснований на властивості феромагнітних матеріалів змінювати магнітну проникність при пружних деформаціях, званих механічним навантаженням Р.
Рисунок 2.2.6
Індуктивність же котушки прямо пропорційна магнітній проникності магнітопровода котушки. Таким чином виходить ланцюг послідовних перетворень: механічна сила – механічна напруженість – магнітна проникність – індуктивність.
Для виготовлення магнітопружніх датчиків застосовують матеріали, що мають явно виражений магнітопружній ефект. До таких матеріалів можна віднести деякі сорта пермалою, які при подовжені на 0,1% збільшують магнітну проникність на 20%.
До переваг магнітопружніх датчиків відносять: висока чутливість; малі габарити, вага і простота конструкції; висока надійність, так як відсутні рухомі частини. Основними недоліками є нестабільність характеристик і висока похибка від температури і гістерезису.
Магнітопружні датчики застосовуються для вимірювання великих механічних зусиль.
Розділ 2. «Елементи автоматики»
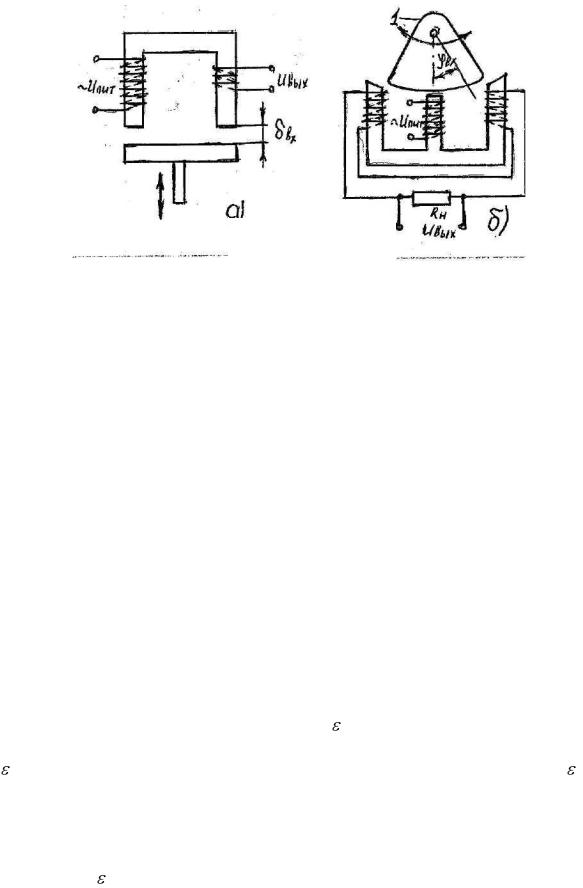
1.В. Трансформаторні датчики також відносяться до групи індуктивних датчиків, оскільки мають на своєму виході взаємоіндуктивність (рис. 2.2.7)
Рисунок 2.2.7
На рис. 2.2.7,а показаний пристрій трансформаторного датчика для вимірювання лінійних переміщень.
Тут при переміщенні рухомого якоря змінюється взаємоіндуктивність і це використовується при модуляції змін вихідної напруги.
На рис. 2.2.7,б показаний пристрій трансформаторного індуктивного датчика для вимірювання кутових переміщень. Принцип дії заснований на зміні взаємної індуктивності потокозщеплення і значення ЕРС в обмотках датчика при кутових переміщеннях феромагнітного сердечника 1 (якорю). При симетричному положенні якоря ЕРС у вихідних обмотках рівні між собою і Uвих = 0. При відхиленні якоря від середнього положення буде змінюватися вихідна напруга за амплітудою, а фаза залежатиме від напрямку переміщення.
Перевага трансформаторних датчиків у тому, що ланцюги живлення і вихідний ланцюг не мають гальванічного зв'язку. Зв'язок між ланцюгами навантаження і живлення тільки магнітний.
2. Ємнісні датчик є плоским конденсатором, ємність якого змінюється при зміні контрольованої величини. Конструкції ємнісних датчиків показані на рисунку 2.2.8.
Як відомо, ємність плоского конденсатора визначається за формулою:
С = 0,088 S/d
де - відносна діелектрична проникність середовища пФ/см (для повітря = 1); S – активна площа пластини (обкладань) конденсатора, см2;
d – відстань між пластинами (обкладаннями), см.
Відповідно за формулою можна побудувати датчики ємнісні, в яких перетворення контрольованої неелектричної величини відбуватиметься за рахунок зміни , S і d.