

Теорія автоматичного керування» Конспект лекцій з дисципліни
.pdfтобто два корені (р2 і р3) розташовані в лівій півплощині комплексної площини, а р1 – в початку координат.
Очевидно, що при Кп1 = 0 система перебуває на межі стійкості, це значення є нижнім граничним значенням коефіцієнта підсилення підсилювача.
Верхнє граничне значення Кп2 неважко визначити, скориставшись аналітичним критерієм Вишнєградського. З цією метою розглянемо вищенаведене характеристичне рівняння.
Для системи 3-го порядку знаходження САУ на межі стійкості забезпечується при рівності добутків середніх і крайніх коефіцієнтів, тобто:
(Твм+Тоб)1=ТвмТобКп2КвмКоб, |
(4.63) |
||
звідки: |
Твм Тоб |
|
|
|
|
||
Кп2 = |
|
. |
(4.64) |
КвмКобТвмТоб |
|||
Твм Тоб
Таким чином, при зміні Кп від 0 до значення КвмКобТвмТоб система стійка, що повністю збігається з отриманим вище результатом D-розбиття при використанні частотного методу.
D-розбиття по двох параметрах.
Для побудови області стійкості в площині 2-х параметрів зручно скористатися критерієм стійкості Михайлова.
Будемо вважати, що обидва параметри μ і ν, що досліджуються, лінійно входять у коефіцієнти характеристичного полінома замкнутої системи F(p).
F(p)=μМ(р) +νN(p)+Z(p) |
(4.65) |
де μ і ν - параметри, вплив яких на стійкість САК досліджується; М(р) і N(p) - поліноми, що є співмножниками μ і ν відповідно; Z(р) - поліном, що не містить ні μ, ні ν.
Здійснивши заміну р=jω, отримаємо характеристичний поліном у комплексній формі:
F(jω)= μ M(jω)+ ν N(jω)+Z(jω)=U(ω) +j(ω), |
(4.66) |
F (jω) є комплексним многочленом, у дійсну U(ω) і уявну частину V(ω) якого лінійно входять конструктивні параметри μ і ν.
У загальному вигляді дійсна й уявна частини можуть бути записані в такий спосіб:
U(ω)=μM1(ω)+νN1(ω)+Z1(ω); (4.67) V(ω)=μM2(ω)+νN2(ω)+Z2(ω);
Коливальній межі стійкості відповідає проходження годографа Михайлова через початок координат комплексної площини, тобто рівність нулю дійсної й уявної частин комплексного характеристичного полінома. Отже:

μM1(ω)+νN1(ω)+Z1(ω)=0; (4.68) μM2(ω)+νN2(ω)+Z2(ω)=0;
Визначення параметрів μ і ν здійснюють шляхом розв’язання системи рівнянь:
|
|
|
|
|
μ = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
(4.69) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
де |
|
|
|
|
ν = |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
u |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Ì 1 ( ) |
|
N1 ( ) |
|
|
|
|
|
; |
|
||||||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
V |
V |
|
||||||||||||||||||
|
Ì 2 ( ) |
|
N2 ( ) |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.70) |
|||
|
|
|
|
|
|
1 ( ) |
N1 ( ) |
|
; |
|
|
||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
( ) |
N2 ( ) |
|
|
|
|
||||||||||||
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||
|
|
Ì 1 ( ) |
|
1 ( ) |
|
. |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Ì 2 ( ) |
|
|
2 ( ) |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Змінюючи ω від 0 до ∞, можна отримати масив значень обох конструктивних параметрів та побудувати в площині цих параметрів відповідну криву залежності μ=f(ν), яка і є основною кривою D – розбиття.
Основна крива доповнюється двома особливими прямими, рівняння яких отримують шляхом прирівнювання до нуля вільного члену та коефіцієнта при старшій похідній характеристичного рівняння замкненої системи.
Основна крива та особливі прямі, заштриховані певним чином, обмежують область, яка являє собою область значень конструктивних параметрів, при яких система буде стійкою.
Повертаючись до розглянутого приклада, припустимо, що досліджується вплив коефіцієнта підсилення підсилювача Кn й постійної часу об'єкта Тоб на стійкість САК.
Характеристичний поліном розглянутої САК має вигляд: |
|
|
F(p)=Твм·Тоб·p+(Твм+Тоб) р2+р+ Кn Квм·Коб= |
(4.71) |
|
=Тоб·(Твмр3+р2)+ Кn·Квм·Коб+р+Твм·р2. |
||
У цьому виразі можна прийняти позначення: |
|
|
μ=Тоб; |
М(р) =Твм·р3+р2; |
|
ν=Кn; |
N(р) =Квм·Коб; |
(4.72) |
|
Z(р) =р+Твм·р2, |
|
У нашому прикладі, після підстановки р =jω, характеристичний поліном, з
урахуванням того, що Тоб=μ, а Кn=ν здобуває вид: |
|
|
||||||||||||||||||||||||||
|
|
F(jω)=μ(-jТвм·ω3–ω2) +ν·Квм·Коб+(jω-Твм·ω2) |
(4.73) |
|||||||||||||||||||||||||
=μ(-ω2)+νКвм·Коб–Твм·ω2+j(μ(Твмω2)+ω); |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
U(ω)=μ(-ω2) + ν·Квм·Коб–Твм·ω2=0; |
(4.74) |
||||||||||||||||||
де можна позначити: |
|
|
|
|
|
V(ω)=μ·ω(-Твмω2) +ν·0+ω=0, |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M1(ω) = -ω2; |
|
|
|
|
|
N1(ω) = Квм Коб; |
|
|
|
Z1(ω) = -Твм ω2; |
(4.75) |
|||||||||||||||||
M2 (ω) = -Твм ω3; |
|
N2 (ω) = 0; |
|
|
|
|
|
|
Z2 (ω) = ω |
|||||||||||||||||||
отже: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
Êâì Êî á |
|
|
= Квм Коб Твм ω3; |
|
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||
|
Òâì 3 |
|
0 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
2 |
|
Êâì |
Êî á |
|
|
|
|
|
|
|
|
|
|
|
(4.76) |
||||||
|
|
|
|
|
|
= Квм Коб ω; |
|
|||||||||||||||||||||
|
Òâì |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 |
|
|
Òâì |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
=ω3+Т2вм ω5=ω3(1+Т2вмω2); |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
Òâì |
3 |
|
|
|
|
|
|
|||||||||||||||||||
тому: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
|
μ= |
|
|
|
Êâì |
Êî á |
|
= |
|
|
|
; |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Òâì |
2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
Êâì Êî á Òâì |
|
|
|
|
|
|
|
|
|
|
(4.77) |
||||||||||
|
|
|
|
|
|
|
|
|
3 |
1 Òâì |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Òâì |
|
|
|
||||||
|
|
ν = |
|
|
|
|
|
|
|
|
= |
|
|
|
|
; |
|
|||||||||||
|
|
|
Êâì |
Êî á Òâì |
|
|
|
3 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
Êâì |
Êî á Òâì |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Змінюючи ω від - до + , можна розрахувати й побудувати в площині параметрів μ, ν основну криву D – розбиття, що являє собою коливальну межу стійкості.
Основна крива доповнюється двома особливими прямими, рівняння яких знаходять в результаті прирівнювання до нуля коефіцієнтів при нульовій і старшій похідних характеристичного полінома, тобто:
Квм Коб Кn= 0, (4.78) Твм Тоб = 0
звідки:
Кn = ν = 0, |
(4.79) |
|
Тоб = μ = 0. |
||
|
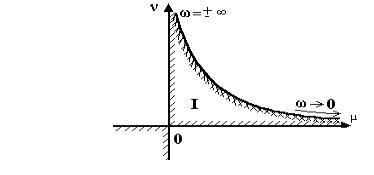
На рисунку представлена основна крива D-розбиття й дві особливі прямі, які співпадають з осями координат.
Правила штрихування:
Спочатку штрихується основна крива D-розбиття, а потім особливі прямі.
Основна крива штрихується ліворуч при збільшенні ω від - до + , якщо> 0; і праворуч, якщо < 0. Оскільки при ω = 0 визначник змінює свій знак на протилежний, то основна крива обходиться двічі, отже двічі заштриховується;
Особливі прямі до точки перетину з основною кривою штрихуються одиночним штрихуванням таким чином, щоб їхні штрихування й штрихування основної криої були спрямовані друг до друга або в різні сторони.
Урозглянутому прикладі крива D-розбиття дозволяє відразу визначити область стійкості. Область, обмежена заштрихованими усередину лініями (область I) є областю стійкості, і це твердження не вимагає додаткової перевірки. Визначення зазначеної області здійснювалося, виходячи з попереднього положення про те, що основна крива D-розбиття є межею коливальної стійкості й саме тому, відповідно до критерію стійкості Михайлова, дійсна й уявна частини характеристичного полінома прирівнювалися до нуля.
D-розбиття по двох конструктивних параметрах можна здійснити, використовуючи які-небудь інші критерії стійкості. Розглянемо можливість застосування іншого критерію стійкості.
Урозглянутої як приклад системи характеристичне рівняння має вигляд (4.53), параметрами, які варіюються є μ=Тоб; ν =Кn, інші параметри фіксовані.
Система 3-го порядку, відповідно до критерію Вишнєградського, перебуває на межі стійкості при рівності добутків середніх і крайніх коефіцієнтів характеристичного рівняння, тобто:
(Твм+Тоб) 1=КобКвмКn·ТвмТоб, |
|
(4.80) |
|||||
звідки: |
Òâì Òî á |
|
1 |
|
1 |
|
|
Кn= |
= |
|
(4.81) |
||||
Êâì Êî áÒâì Òî á |
Êâì Êî áÒî á |
Êâì Êî áÒâì |
|||||

Графік залежності Кn=f(Тоб), що представляє собою геометричну суму гіперболи й прямої лінії, паралельної осі абсцис, і є основною кривою D-розбиття.
Kn
0







 Тоб
Тоб
Рівняння особливих прямих, як і вказувалося вище, визначають із умови рівності до нуля коефіцієнтів при старшій і нульовій похідних характеристичного рівняння:
Твм·Тоб=0; |
(4.82) |
|
Кn·КвмКоб=0, |
||
|
||
звідки: |
|
|
Тоб = μ= 0, |
(4.83) |
|
Кn = ν = 0. |
||
|
||
Ці прямі збігаються з віссю ординат і віссю абсцис відповідно. |
|
|
Для системи 3-го порядку такий підхід набагато простіший, ніж |
|
розглянутий вище, оскільки у даному випадку застосований критерій стійкості, який використовується саме для систем 3-го порядку.
Якість керування.
Стійкість Стійкість САУ характеризує можливість виконання завдання керування, яке поставлене перед системою в принципі, але не дає відповіді на питання про якість її виконання. Стійкі САУ працездатні, але проте необхідно, щоб процес керування здійснювався при забезпеченні певних якісних показників.
У стійких САК перехід від одного сталого стану до іншого сталого стану, залежно від значень конструктивних параметрів системи може відбуватися за різний інтервал часу. Характеризуватися різними динамічними й статичними (сталими) помилками, здійснюватися монотонно або з певною кількістю коливань відносно нового сталого стану.
Зазначені властивості, як і деякі інші, у цілому визначають якість процеса керування. При всьому їхньому різноманітті можна виділити декілька істотних, які з найбільшою повнотою визначають якість керування майже для всіх САК.
Найбільше повно відбивають якість керування прямі показники якості, які визначаються в основному по виду перехідної характеристики.
Прямі показники якості
До основних показників якості керування можна віднести наступні
– час керування;
–перерегулювання;
–коливальність;
–стала (статична) помилка.
При цьому слід зазначити, що в деяких випадках до якості керування можуть застосовуватися й інші вимоги, наприклад максимальна швидкість зміни керованої величини, основна частота коливань й ін.
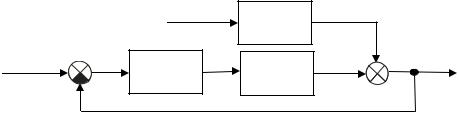
Розглянемо основні показники якостей керування в системі, структурна схема якої наведена на малюнку.
f(p) Wзб(p)
Y(p) |
ε(p) |
Wкч(p) |
U(p) |
Wкер(p) |
X(p) |
|
|
На цьому малюнку позначено:
Y(p) – зображення по Лапласу задаючого впливу;
Х (р) – зображення по Лапласу фактичнеого значення керованої величини; f(р) – зображення по Лапласу зовнішнього впливу, що збурює;
U(р) – зображення по Лапласу керуючого впливу;
(р) – зображення по Лапласу помилки керування, ( p) Y ( p) X ( p) ;
Wкч(p) – функція передачі керуючої частини САК.
Wзб(p) і Wкер(р) - передатні функції об’єкта по каналах збурення і керування відповідно.
Реально в розглянутій системі діють два вхідних впливи: що задає у(t) й та, що збурює – f(t). У лінійних системах керування при аналізі реакції системи на одночасну дію двох вхідних впливів може бути застосований метод суперпозиції. Сутність його полягає в тім, що сумарна реакція системи на кілька впливів дорівнює сума реакцій на кожне з них. Це дозволяє проводити аналіз якості керування, вважаючи, що на систему діє тільки один вхідний вплив, а інші дорівнюють нулю.
Слідкуючий режим.
У розглянутому прикладі спочатку припустимо, що на вхід системи впливає тільки завдання у(t), а збурення f(t)=0. У цьому випадку одержуємо так званий слідкуючий режим, у якому керована величина х(t) прагне досягти заданого значення у(t).

В сталому режимі при у = соnst керована величина х(t) теоретично через час
t = установлюється |
значення керованої величини х( |
), яке |
може |
відрізняться від заданого |
у на величину у( ) (статистичні |
системи) |
або |
дорівнювати у (астатичні системи). При цьому варто пам'ятати, що по своїх властивостях, які визначаються структурою САУ, у статичній системі в сталому режимі помилка у( ) керування існує завжди, а в астатичній вона відсутня.
Визначимо по перехідній характеристиці основні показники якості керування в статичній системі, що працює в слідкуючому режимі, тобто при
у=соnst, f(t)=0.
Сформулюємо визначення основних показників якості керування: 1. Час керування
Часом керування tк називається інтервал часу, у протягом якого, починаючи з моменту початку впливу на систему, до моменту, коли всі відхилення керування величини õ(t) від її сталого значення х( ) стануть менше
наперед заданої величини .
За звичай на практиці приймають, що після закінчення часу керування всі відхилення керованої величини від сталого значення не повинні перевищувати 5% від усталеного значення, тобто 0,05 х( ). Таким чином, якщо на графіку
перехідної характеристики нанести дві горизонтальні лінії на рівнях 1,05 х( ) і 0,95 х( ), отримаємо деяку зону між цими лініями, з якої після закінчення часу керування tк не повинна виходити керована величина х(t).
У цілому цей показник якості характеризує тривалість процесу керування. При налаштуванні керуючої частини її параметри вибирають такими, щоб tк було мінімальним.
2. Перерегулювання
Перерегулюванням називають максимальне відхилення керованої величини
х1max від сталого значення х( ) виражене у %.
Абсолютне значення максимального відхилення х1max визначається по кривій перехідної характеристики:

х1max x1max x( )
Відповідно, у відносних одиницях
,% х1max x( ) 100% x( )
Вважається, що при виконанні необхідних вимог відносно інших показників якості, якість керування тим вище, чим менше ,%.
3. Коливальність.
Коливальність процеса характеризується кількістю періодів коливань величини х(t) відносно сталого значення х( ) за час керування tк.
Якщо за цей час відбуваєьться коливань більше заданої кількості, то вважається, що система не має необхідної якості керування в частині її коливальности. Практично вважають припустимими 1 – 2 коливання, іноді 3 – 4.
Коливальність процеса досить повно характеризується показником загасання , тобто загасанням амплітуди коливань за один період.
Ступенем загасання називається різниця між першим х1max і другимх2max максимальними відхиленнями керованої величини х(t) від сталого значення х( ), виражене у %, тобто
Ψ,% = х1max - x2max 100%
x1max
4. Статична помилка
Під статичною помилкою ( ) розуміють різницю між заданим у й
фактичним усталеним значенням х( ) керованої величини х(t).
Статистична помилка може бути визначена в абсолютних одиницях виміру (Ом, В, А, Ра, м, і т. і.). У цьому випадку
y (t) y - x(t)
Вабсолютних одиницях виміру стала помилка у( ) для статичних систем
нескладно визначається аналітичним способом.
У розглянутому прикладі конкретної системи, що працює в слідкуючому режимі, функція передачі замкнутої системи по каналу впливу, що задає, для вихідної величини х(у).
Фух( р) |
|
|
Wкч( p) Wкер( p) |
; |
||
1 |
W ( p) W ( p) |
|||||
|
|
|||||
|
|
|
кч |
кер |
|
|
де W (p) = Wкч (p) · Wкер (р) – функція передачі розімкнутойїсистеми. Зображення по Лапласу вихідної величини в динаміці:
X ( р) Фyx ( р) Y ( р),
а в сталому режимі
X (0) Фух(0) Y (0) 1 KK Y (0),

де К= Ккч · Ккер –коефіцієнт передачі розімкненої системи; Ккч -коефіцієнт передачі керуючої частини;
Ккер -коефіцієнт передачі об’єкта керування по каналу керуючого впливу. Оригінал сталого значення керованої величини
х( ) 1 KK у
Оригінал сталого значення помилки керування в абсолютних одиницях виміру
у( ) у х( ) у 1 1 KK 1 уK .
Аналіз отриманого виразу свідчить про те, що стала помилка в абсолютних одиницях виміру залежить від величини вхідного впливу у, отже при різних значеннях завдання, помилка, що встановилася, теж буде різною. Тому такий показник якості керування не є абсолютно об'єктивною оцінкою самої системи керування, оскільки характеризує не тільки власні властивості САК, але багато в чому залежить від величини зовнішнього впливу.
Для усунення зазначеного недоліку сталу помилку виражають у відносних одиницях (у частках або %).
o |
|
у( ) |
|
у х( ) |
|
|
y |
( ) |
|
|
|
. |
|
y |
у |
|||||
|
|
|
|
У цьому випадку, при аналітичному визначенні ó ( ) у частках маємо:
0 |
( ) |
у( ) |
|
|
y |
|
|
|
1 |
, |
|
y |
|
|
|
|
|
|
|||||
у |
(1 |
K) у |
1 |
K |
|||||||
|
|
|
|
|
|||||||
при потребі отримання значення відносної статичної помилки керування в % розраховане значення участках слід помножити на 100.
Як видно з отриманого виразу y0 ( ) залежить тільки від власних параметрів
системи (К = Ккч · Ккер), а тому є об'єктивною оцінкою якості самої системи керування і не залежить жодним чином від зовнішних впливів.
Розглянемо визначення основних показників якості в астатичній системі, що працює у тому ж слідкуючому режимі (у= const, f(t)=0).

Час керування tк, перерегулювання ,% , ступінь загасання ,% визначаються аналогічно розглянутому вище.
0,05х( )
,% х1max x( ) 100% x( )
,% x1max x2max 100%.x1max
Статична помилка у( ) в астатичних системах відсутня, оскільки х( )=у, тому у( ) =0 як в абсолютних, так й у відносних одиницях.
Стабілізуючий режим
При визначенні основних показників якості в САК, що працюють у стабілізуючому режимі, передбачається, що на вході системи діє зовнішнє збурення f(t), а вплив, що задає, у = 0.
Виконуючи своє функціональне призначення, система керування працює таким чином, щоб керована величина у сталому стані х (∞) прагнула до заданого значення у. Але, оскільки в даному режимі у = 0, то стале значення вихідної величини х ( ) також повинне бути рівним нулю в астатичних системах або
відрізнятися від нуля в статичних системах на величину f ( ).
Розглянемо способи визначення основних показників якості по перехідній характеристиці статичної системи, що працює в стабілізуючому режимі
(f(t)=const = f, у = 0).