

Первичные изм. преобразователи. Часть 2
.pdfDMB = 1,4 ¸1,6 ,
d MB
где: dMB- диаметр жесткого центра уплотнительной мембраны (диаметр штока рычага) = 8 мм;
DMB- диаметр рабочей части уплотняющей мембраны; DMB = 12,0÷14,0 мм при эффективной площади;
FэфМВ = 0,95÷1 см2.
Осевое усилие уплотняющей мембраны вывода воспринимается двумя гибкими тягами (4) (рис. 8.11.2) диаметром dTB и длиной lTB . Каждая из этих
тяг испытывает напряжение σТВ, |
пропорциональное осевой нагрузке РМВ от |
|||||||
воздействия рабочего давления РСТ. |
|
|
|
|
|
|
||
σ TB = |
P |
= |
PCT FэфM |
= 2 |
PCT FэфM |
. |
(8.11.1) |
|
MB |
|
|
|
|||||
F |
|
πd 2 |
πd 2 |
|||||
|
|
|
|
|
|
|||
|
эфMB |
|
2 |
TB |
|
TB |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Откуда можно определить диаметр тяги, принимая коэффициент запаса прочности n = 2,0, [σ]ТВ =40 кГс/мм2 допустимые напряжения для материала 36НХТЮ.
[σ ]TB £ |
σ TB |
= |
2PCT FэфM 12 |
|
|
|||||
πd 2 |
|
|
|
|
||||||
|
|
|
|
|
TB |
|
|
|
|
|
откуда определяем dTB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2PCT FэфM n |
|
|
|
|
|
|
|||
dTB ³ |
= |
|
2 * 400 *1* 2,0 |
= 3,47 . |
||||||
π [σ ]TB |
|
3,14 * 40 |
||||||||
|
|
|
|
|
|
|||||
Принимая конструктивную длину тяги вывода lTB=30 мм, зная диаметр тяги dTB = 3,5 мм, определим жесткость тяги вывода (Cl)TB :
(Cl |
) |
= |
3EJ |
= |
P |
; |
P = (Cl |
) * λ , |
|
l 3 |
λ |
||||||||
|
TB |
|
|
|
|
TB |
|||
|
|
|
TB |
|
|
|
|
|
220

|
|
|
|
|
|
|
|
|
Таблица 8.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Диаметр |
|
Эффективная |
Толщина |
|
Р |
разр. |
С Угловая |
||
№ |
Диаметр |
Глубина |
ограничением |
|
жесткость |
|||||
DMB, |
площадь Fэф, |
мембраны |
жесткого центра |
|
||||||
п/п |
(мм) |
dMB, (мм) |
(см2) |
h, (мм) |
гофра t, (мм) |
|
|
|
CyM, |
|
(МПа) |
(кгс/см2) |
|
||||||||
|
|
|
|
|
|
|
[кг*мм/рад] |
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
0,10 |
0,995 |
80-85 |
800÷850 |
570 |
|
|
|
|
|
|
|||||||
221
2 |
1 |
0,14 |
0,993 |
124-128 1240÷1280 2670 |
13 |
8 |
|
|
|
3 |
1 |
0,15 |
0,992 |
137-142 1370÷1420 3450 |
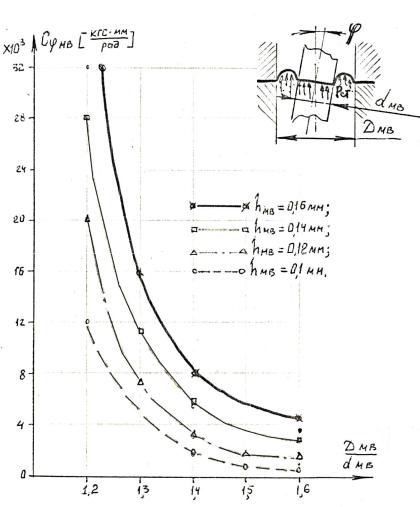
Рис. 8.11.1. Зависимость угловой жесткости мембранного вывода от
соотношения диаметров DMB , dMB и толщины hMB мембраны
где Е = 2*10-4 кгс/мм2 - для стали; |
|
|||||||||||||
|
πdTB4 |
= J - полярный момент инерции сечения; |
||||||||||||
32 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
dTB - диаметр тяги вывода |
|
|
|
|
|
|||||||||
(Cl |
)TB |
= |
3Eπd |
4 |
|
|
(8.11.2) |
|||||||
|
|
|
TB |
|||||||||||
|
32l 3 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
TB |
|
|||||
угловая жесткость: |
|
|
|
|
|
|
|
|
|
|
|
|
||
(C |
ϕ |
) |
|
= |
nr |
= |
PlTB |
, |
|
|||||
|
|
|
|
|||||||||||
|
|
TB |
|
|
ϕ |
|
ϕ |
|
||||||
|
|
|
|
|
|
|
|
|
||||||
где nr - внешний момент;
φ - угол поворота балки в рад.
222
В свзи с малость угла поворота |
|
балки - тангенс угла tgϕ = |
λ |
приравниваем |
|||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lTB |
|
углу φ в рад. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(C |
ϕ |
) |
= |
nr |
= |
PlTB |
|
= |
PlTB2 |
|
; |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
TB |
|
ϕ |
|
|
|
|
λ |
|
|
|
|
|
λ |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
lTB |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(Cϕ ) |
= |
(Cl )TB λlTB2 |
= |
3EπdTB4 lTB2 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
TB |
|
|
|
|
λ |
|
|
|
|
|
|
|
32l |
3 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TB |
|
|
|
|
и окончательно имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(C |
|
|
) |
= |
(C |
) l |
TB |
; |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ϕ TB |
|
|
l |
|
TB |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(C ) |
= |
3Eπd 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ϕ |
|
|
|
|
|
|
TB |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
TB |
|
|
32lTB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
угловая скорость одной тяги вывода равна: |
|
|
|
|
|
|
|||||||||||||||||||
(Cφ ) = |
3Eπ dTB4 |
= |
3* 2 *104 *3,14 *3, 54 |
= 29, 449 |
|
|
|||||||||||||||||||
|
|
|
|
||||||||||||||||||||||
TB |
|
|
32lTB |
|
|
|
|
|
|
|
|
|
|
|
32 *30 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Результирующая угловая жесткость узла вывода мембранным разделителем (dMB =8 мм; DMB = 13 мм; h = 0,15 мм) находится по формуле:
(Cϕ )вывода = CϕM + 2(Cϕ )TB ,
где CφM - угловая жесткость мембраны;
(Cφ)TB - угловая жесткость одной тяги вывода.
(Cϕ )вывода = 3,450 + 2 * 29,449 = 62,349 ;
(Cφ )вывода = 62, 349
и окончательно жесткость вывода составит:
C |
= |
Cφвыв |
= |
62, 349 |
= 17, 3 |
l2 |
|
||||
выв |
|
602 |
|
||
223
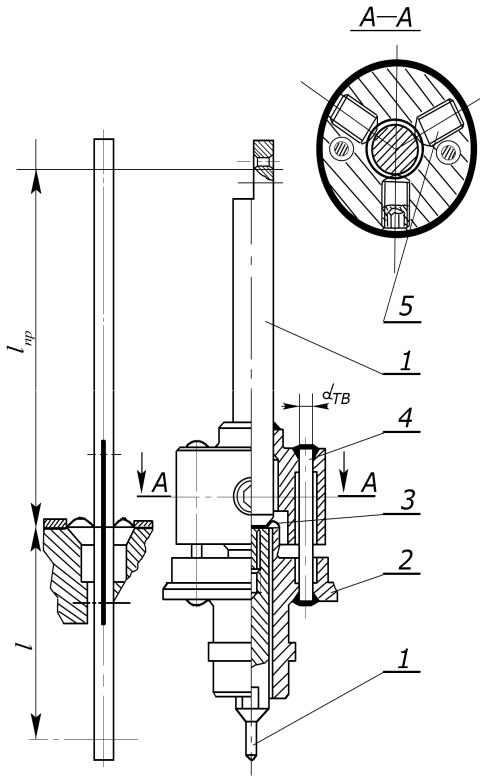
Рис. 8.11.2. Схема и конструкция мембранного вывода из полости высоких давлений дифманометров: 1 - рычаг; 2 - стойка; 3 - мембрана; 4 -
тяга; 5 - винт
224
Вопросы для самоконтроля по главе 8
1.Перечислите область применения и основное назначение преобразователей перепада давления.
2.Какие вам известны конструкции преобразователей для измерения перепада давления с пневматическим выходным сигналом?
3.Объясните принцип конструирования преобразователей перепада давления на основе компенсационных дифманометров.
4.Объясните принцип действия пневматического преобразователя перепада давления.
5.Укажите основные параметры и технические характеристики преобразователя перепада давления с силовой компенсацией.
6.Какие Вам известны схемы измерительных блоков преобразователей перепада давления?
7.Какие Вам известны кинематические схемы пневмосиловых преобразователей?
8.Какие параметры расчитываются при выборе силового элемента обратной связи, индикаторе рассогласования, пневмоусилителя и корректора нуля?
9.Какие устройства вывода используются в преобразователях перепада давления с пневматическим выходным сигналом?
225
Заключение
Первичные преобразователи представляют собой один из интереснейших объектов изучения. Как уже было показано из предшествующего изложения, первичный преобразователь из простого крешерного прибора вырос до высокоинтеллектуального многофункционального прибора.
В настоящее время измерительные первичные преобразователи широко применяются для получения информации об окружающем нас мире и об специальных параметрах процессов, и представляют собой те компоненты системы, которые делают информацию достаточной для обработки.
Одной из задач составителя учебного пособия является объединение информации, которая требуется инженеру-приборостроителю и пользователю, которая будет использована для решения тех или иных задач при конструировании или выборе первичных преобразователей, что позволит решить их наилучшим образом.
Прежде чем приступить к разработке нового прибора или к его использованию, необходимо составить техническое задание, указать назначение прибора и его свойства, определить условия применения прибора и особенности его эксплуатации. Необходимо установить, какие из величин, характеризующих объект, прибор должен измерять. После установления подлежащих измерению величин, необходимо выбрать прибор, который следует применить, и то, какими преобразователями он должен быть оснащен.
После теоретического анализа работы исследуемого объекта или происходящих в нем процессов следует выбрать возможные границы частотного диапазона, определить предполагаемые максимальные значения измеряемых физических величин.
Предварительное ознакомление с исследуемым объектом помогает определить место наиболее целесообразного размещения датчика, способа его крепления, габариты и массу всего прибора. Точность прибора выбирают
226
в зависимости от требований, связанных с работой исследуемого объекта. Следует опасаться излишних требований, что, как правило, снижает надежность прибора, увеличивая его габаритность и вес.
После составления технического задания следует определить пути его выполнения. Большое значение имеет правильный выбор прибора и системы датчиков.
Например, для измерения смещений с большими амплитудами (измеряемыми в мм) удобными могут оказаться датчики механических сигналов или электромагнитные преобразователи. Для измерения малых амплитуд (измеряемых в мкм)могут быть применены емкостные датчики. При измерении ускорений с низкими частотами можно воспользоваться электромагнитными акселерометрами, с высокими частотами – пьезоэлектрическими акселерометрами.
Следующим этапом разработки прибора является выбор и обобщенный расчет его обязательных узлов, нахождение функции преобразования, оценка чувствительности прибора к измеряемым физическим величинам, а также общая конструктивная компоновка.
Результаты расчета или даже изготовления опытного макета прибора не исключает корректировку его конструкции, и его отдельных узлов и деталей. От опытного макета переходят к опытным образцам, проводят испытания и регулировку, а затем пускают опытную партию в производство.
Из сказанного следует, что при конструировании приборов следует учитывать множество различных факторов, переплетающихся между собой. Поэтому создание удачной конструкции возможно при наличии у конструктора глубоких специальных знаний и навыков в самых различных областях приборостроения, начиная с основ электро- и радиотехники, и заканчивая технологией производства приборов. Разработка и грамотная эксплуатация приборов требуют также глубоких знаний, полученных при изучении общеобразовательных дисциплин, таких как математика, физика, механика и вычислительная техника.
227
Для студентов, которые готовят себя к будущей деятельности в области приборостроения, данное учебно-методическое пособие поможет получить общее представление о первичных преобразователях, терминологии в теории первичных преобразователей, а также изучить классификацию преобразователей.
Особое внимание в учебно-методическом пособии уделено различным типам первичных преобразователей, физическим эффектам, на базе которых они созданы, чувствительности к измеряемым физическим величинам.
В большинстве случаев рассмотрены конструктивные особенности и области применения преобразователей. В отдельных случаях рассмотрены методики расчета основных характеристик датчиков.
Учебно-методическое пособие «Первичные преобразователи» может быть использовано студентами и аспирантами соответствующих специальностей, а также специалистами, занимающимися вопросами применения первичных преобразователей в контрольно-измерительных приборах.
228
Библиографический список
1.Бриндли, К. Измерительные преобразователи: справочное пособие. / К.Бриндли. Пер. с англ. д-ра техн. наук Сычева Е.И. – М.: Энергоатомиздат, 1991.-144с.
2.Гевондян, Т.А. Приборы для измерения и регистрации
колебаний. /Т.А.Гевондян, Л.Т.Киселев. - |
М.: Изд-во |
машиностроительной литературы, 1962.-467с. |
|
3.Маргелов, А.И. Датчики положения на основе эффекта Холла. //Элекронные компоненты. - 2004.-№8. – 24-35 с.
4.Туричин, А.М. Электрические измерения неэлектрических величин. /А.М.Туричин. - М.: Энергия, 1979.- 690с.
5.Патент 2171469 Россия, МКИ. G01№29/04. Способ неразрушающего контроля качества объекта и устройство для его осуществления./ О.Н.Будадин, В.И.Колганов (Россия); опубл. 27.02.2001, Бюл. №21.
6.Будадин, О.Н. Тепловой метод неразрушающего контроля и диагностики технического состояния материалов, изделий и конструкций: автореф. дис.докт. тех. наук./ СЗТУ. - . СПб.: 2001.
–25 с.
7.Агейкин, Д.И. Датчики контроля и регулирования. /Д.И.Агейкин, Е.Н.Костина, Н.Н.Кузнецова. - М.: Машиностроение, 1965.-213с.
8.Розенблит, Г.Б. Датчики с проволочными преобразователями для
исследований двигателей внутреннего сгорания. /Г.Б.Розенблит, П.И.Виленский, И.Я.Горелик. - М.: Машиностроение, 1966.-
136с.
9.Маргелов, А.И. Магниторезистивные датчики положения. //Chip News. - 2005. – №2. – 54-65 с.
10.Маргелов, А.И. Датчики положения на эффекте Холла. Журнал Электронные компоненты 2004. - №8. - 54-65с.
11. Тюрин, |
А.М. |
Основы |
гидроакустики. |
/А.М.Тюрин, |
229