

Конспект лекций по ТАУ
.pdfнаклоны асимптот ЛАЧХ на +20 дБ/дек, а каждый полином знаменателя изменяет наклоны на –20 дБ/дек.
Передаточная функция нескорректированной системы будет иметь следующий общий вид:
W (s) = |
|
(τ1s +1) |
|
, |
s r (T s +1)(T s +1)(T s +1)... |
||||
1 |
2 |
3 |
|
|
где r − порядок астатизма нескорректированной системы; τ1, T1, Т2, Т3…– постоянные времени числителя и знаменателя, соответственно.
Тогда ПФ корректирующего устройства в соответствии с (4.1) будет определяться выражением
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|||
|
|
|
|
k |
ω2 |
s +1 |
|
|
|
|
s |
(T1s +1)(T2 s +1)... |
|
||||
Wk |
(s) = |
|
|
|
|
|
|
|
× |
|
. |
||||||
|
1 |
|
1 |
|
|
1 |
|
|
|
|
(τ s +1) |
|
|||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
s |
ωk |
s +1 |
|
s +1 |
ω4 |
s +1 ... |
|
|
|
|
|
|
|||
|
|
|
ω3 |
|
|
|
|
|
|
|
|
||||||
Пример 4.10. Пусть система описывается ПФ вида:
W (s) = 20 . s(0,1s +1)(0,05s +1)
Необходимо провести частотный синтез корректирующего звена, исходя из следующих требований к системе:
x max .= 0,033 град; g& m = 30 град/с;
&g&m = 30 град/с2; М = 1,5.
Определим параметры желаемой ПФ.
201

Амплитуда и частота эквивалентного гармонического воздействия:
|
|
ωk |
= |
30 |
= 1; |
g max |
= |
302 |
= 30. |
||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
30 |
|
|
|
|
|
|
30 |
|
|
||||||||
Координата контрольной точки Ак : |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L(ωk ) = 20lg |
|
|
|
= 59 дБ . |
||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0,033 |
|
|
|
|
|
|
|
|
|||
Границы среднечастотной области: |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ω0 = |
30 |
= 30; |
ωc = |
|
|
1.5 |
|
30 = 51,96; |
||||||||||||
|
|
|
1,5 - |
|
|||||||||||||||||
|
|
|
|
0,033 |
|
|
|
|
1 |
|
|
|
|||||||||
ω2 |
£ |
1,5 −1 |
51,96 = 17,32 ; |
ω3 |
³ |
1,5 +1 |
51,96 = 86,6 . |
||||||||||||||
|
|
||||||||||||||||||||
|
1,5 |
|
|
|
|
|
|
|
|
|
|
|
1,5 |
|
|
||||||
В области ВЧ желаемая ЛАХ должна повторять наклон ЛАХ нескорректированной системы, а именно –60 дБ/дек, поэтому выбираем
ω4 = 1000 > ω3..
Желаемый коэффициент усиления
k = 10[59,08/20] ≈ 900.
Окончательно, желаемая ПФ будет иметь вид:
G(s) = |
900(0,058s +1) |
. |
|
s(s +1)(0,01s +1)(0,001s +1) |
|||
|
|
Передаточная функция корректирующего устройства
202

W (s) = |
900(0,058s +1) |
× |
s(0,1s +1)(0,05s +1) |
= |
s(s +1)(0,01s +1)(0,001s +1) |
|
|||
k |
20 |
|
||
|
|
|||
= 45 (0,1s +1)(0,05s +1)(0,058s +1) . (s +1)(0,01s +1)(0,001s +1)
После получения математической модели корректирующего звена возникает вопрос о её технической реализации. Здесь есть два варианта: реализация на базе аналоговых электронных элементов (непрерывная реализация) и цифровая (дискретная) реализация.
Аналоговые корректирующие звенья создают с помощью электронных операционных усилителей. Такие устройства достаточно надёжны, компактны, имеют малое энергопотребление. Эти положительные особенности привели к широкому применению аналоговые корректирующих звеньев в промышленном оборудовании.
203
4.7. Аналоговые корректирующие звенья Пассивные корректирующие звенья
Пассивные корректирующие звенья называются так, потому что не позволяют увеличивать коэффициент усиления.
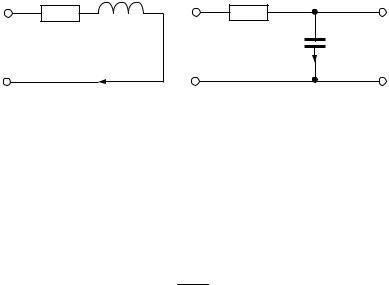
Рассмотрим, как получаются ПФ некоторых простейших схем (рис. 4.31).
а) |
|
б) |
|
|
R |
L |
|
R |
|
u |
i |
u1 |
C |
u2 |
|
|
i |
|
Рис. 4.31. Простейшие электронные схемы
Для схемы на рис. 4.31, а будем считать входным сигналом приложенное напряжение u, а выходным – ток в цепи i. Тогда процессы в схеме описываются уравнением
u(t) = L di(t) + Ri(t), dt
которое в изображениях по Лапласу приобретает вид
U (s) = LpI (s) + RI (s) = I (s)(Ls + 1).
204

Передаточная функция между входом и выходом схемы
W (s) = |
I (s) |
= |
1 |
= |
|
1 R |
|
= |
k |
|
, |
|
|
Ls + R |
|
L |
|
|
Ts + 1 |
||||||
U (s) |
|
|
s + 1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
R
где k = 1/R – коэффициент передачи, T = L/R – постоянная времени.
Таким образом, ПФ схемы рис.4.31, а соответствует апериодическому звену.
Для схемы на рис. 4.31, б будем считать входной величиной напряжение u1, а выходной – u2. При расчете ПФ должны соблюдаться два условия:
−цепь не нагружена (никаких элементов к выходным зажимам не подключено, либо эти элементы имеют сопротивление, стремящееся к бесконечности);
−сопротивление источника входного напряжения настолько мало, что им можно пренебречь.
u1 (t) = i(t)R + uc (t),
|
i(t) = C |
duc |
(t) |
|
|
|
|
. |
|
|
|
|||
|
|
dt |
||
Переходя к изображениям по Лапласу, имеем
U |
(s) = (RCp +1)U |
|
(s), |
|
|
1 |
U2 (s) = Uc (s). |
c |
|
|
|
|
|
|
Передаточная функция
205
W (s) = |
U 2 (s) |
= |
U c (s) |
= |
1 |
, |
U1 (s) |
(RCp + 1)U c (s) |
Tp + 1 |
где T = RC – постоянная времени.
Таким образом, ПФ схемы рис. 4.31, б также соответствует апериодическому звену.
Обобщая второй из приведенных примеров, рассмотрим пассивный четырехполюсник постоянного тока – электрическую цепь из резисторов, конденсаторов и индуктивностей (рис. 4.32).
206

Z1
|
|
|
|
Z2 |
|
|
|
|
|
|
|
Zн |
U |
|
|
|
|
U |
|
|
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.32. Пассивный четырехполюсник
При сделанных выше допущениях ПФ пассивного четырехполюсника
W (s) = |
U |
2 |
(s) |
= |
Z2 |
(s) |
|
|
|
|
|
|
, |
||
|
|
|
|
|
|||
|
U1(s) |
|
Z1(s) + Z2 (s) |
||||
где Z1 и Z2 – операторы сопротивлений четырехполюсника.
Z (s) = R + |
1 |
+ L s, |
Z |
(s) = R + |
1 |
+ L s. |
|
|
|
||||||
1 |
1 |
C1s |
1 |
2 |
2 |
C2s |
2 |
|
|
|
|
|
|
||
Изменяя вид операторов Z1 и Z2, можно получить большое количество четырехполюсников, которым соответствуют различные передаточные функции. Например, рассмотрим схему на рис. 4.33.
C
R1
U |
R2 |
|
|
U |
|
|
|||
|
|
|
|
|
207

Рис. 4.33. Пример пассивного четырехполюсника
W (s) = |
U |
2 |
(s) |
= |
|
Z2 (s) |
= |
|
|
R2 |
|
= |
|
R2 |
(1+ R1Cs) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||
U (s) |
Z (s) + Z (s) |
|
R1 |
/ Cs |
|
|
|
|
|
||||||||
|
|
|
|
|
|
R |
+ R (1+ R Cs) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
+ R2 |
|
|
|
|
||
|
|
1 |
|
|
1 |
2 |
|
1/ Cs + R1 |
1 |
|
2 |
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Полученное выражение можно переписать в виде
W (s) = |
U 2 |
(s) |
= |
|
R2 (1+ R1Cs) |
|
= |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
U1 (s) |
|
|
R1 + R2 + R1R2Cs) |
||||||||||
|
|
|
R2 |
(1+ R Cs) |
|
|
k(τs +1) |
||||||||
|
|
|
|
|
|
||||||||||
= |
|
|
R1 |
|
1 |
|
= |
||||||||
|
|
|
|
|
|
||||||||||
(R + R ) |
+ |
|
R R |
|
|
Ts +1 |
. |
||||||||
|
1 2 |
|
|
1 2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||
|
R1 |
|
1 |
R1 + R2 |
Cs |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
В качестве еще одного примера пассивного четырехполюсника рассмотрим колебательное звено (рис.
4.34).
R L
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
C |
|
|
U |
||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
208
Рис. 4.34. Реализация колебательного звена
Запишем ПФ цепи:
W (s) = |
U 2 (s) |
= |
|
|
|
|
1/ Cs |
|
|
= |
|
|
|||||||
|
|
|
R + sL |
|
|
|
|
|
|||||||||||
|
|
|
|
U1 (s) |
|
+1/ Cs |
|
|
|||||||||||
= |
|
|
1 |
|
|
|
|
= |
|
|
|
|
|
1 |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
LCs2 + RCs +1 |
T 2 p2 +2ξTp +1 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
T = |
|
|
; |
ρ = |
|
|
L |
; |
|
ξ = |
R |
, |
|
|||||
|
LC |
|
|
|
|||||||||||||||
|
|
|
|
|
2ρ |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
||||
где T – постоянная времени; ρ – волновое сопротивление; ξ – затухание (демпфирование).
Активные корректирующие звенья
Активные корректирующие звенья строятся на базе операционных усилителей (ОУ), которые выполняются по интегральной технологии. ОУ представляет собой усилитель постоянного тока малой мощности с большим коэффициентом усиления.
Рассмотрим ПФ для типового включения ОУ (рис. 4.35).
|
|
|
Ioc(s |
|
|
Zoc(s) |
|||||||
|
Z1(s |
I1(s |
I(s |
|
|
|
|
|
209 |
||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
U2 |
|||
|
|
|
|
|
|
|
|
||||||

Рис. 4.35. Операционный усилитель
Реальные микросхемы ОУ имеют большой коэффициент усиления kоу и большое входное сопротивление rвх, так что можно положить
kоу ≈ ∞ и rвх ≈ ∞.
Из условия rвх ≈ ∞ следует, что I1(s) ≈ – Iос(s), т.е. I(s)
≈ 0.
Напряжение на инвертирующем входе приближенно равно 0, и тогда
U1(s) ≈ I1(s)Z1(s);
U2 (s) ≈ Iос(s)Zос(s) ≈ −I1(s)Zос(s).
Следовательно, ПФ схемы на рис. 4.35 описывается формулой:
W (s) = U 2 (s) ≈ − Zос (s) .
U1 (s) Z1 (s)
210