

ТАУ-2_УТС СУХТП
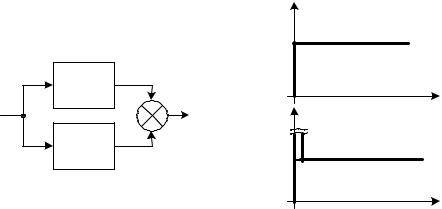
.pdfПримером может служить гидравлическая емкость, рис.8.12, если отбор жидкости осуществляется насосом (не самотеком) и не зависит от уровня жидкости или электродвигатель, если за входной сигнал принять напряжение на обмотке управления, а за выходной угол поворота вала двигателя и пренебречь массой ротора.
Qп
H |
?(t) |
|
uвх(t) |
Рис. 8.12. Примеры интегрирующих звеньев
Действительно, пусть , например, в гидравлической емкости, рис.8.12. приток увеличится на некоторую величину ∆Qпр относительно равновесного значения. Тогда уровень начнет
возрастать с постоянной скоростью, поскольку сток постоянен и не зависит от уровня. Интегрирующее звено (интегратор) относится к классу звеньев без самовыравнивания – переходная характеристика неограниченно возрастает. Звено обладает памятью. при сбросе входного сигнала до нуля ”запоминается ” последнее значение сигнала на выходе рис.8.11-б. Пример процессов в таком звене приведен ниже
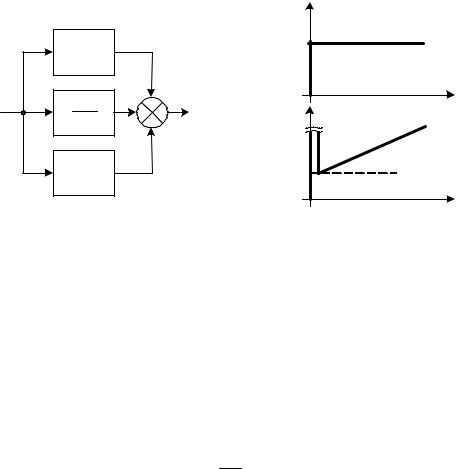
2. Реальное интегрирующее звено
Реальное интегрирующее звено может быть представлено последовательным соединением звеньев: идеального интегрирующее и инерционного. Его передаточная функция
W (s) = |
K |
|
K |
1 |
|
|
|
|
= |
|
|
|
. |
(8.33) |
|
s (Ts +1) |
s |
Ts +1 |
|||||
Переходная характеристика приведена на рис 8.13. Движение с постоянной скоростью устанавливается поле завершения переходного процесса. Звено обладает инерционностью, зависящей от постоянной времени Т..
 x(t)
x(t)
1 |
t |
 h(t) идеальное реальное
h(t) идеальное реальное
arctgK t
T
Рис. 8.13. Переходная характеристика реального интегратора

3Типовые законы регулирования и их характеристики
Всовременных АСУТП существует большое число контуров регулирования. В тоже время объекты управления весьма разнообразны, а объекты различных отраслей промышленности имеют свою специфику. В таких условиях разработка отдельного регулятора для каждого контура регулирования экономически не целесообразно. Промышленность России и зарубежных стран выпускает серийные регуляторы (контроллеры) с так называемыми типовыми законами регулирования (типовые регуляторы). Они могут быть реализованы не только аппаратно, т.е в виде отдельных приборов, но и на свободно программируемых контроллерах - программно.
Любой регулятор характеризуется своим законом регулирования. Закон регулирования это
алгоритм, согласно которому регулятор по входному сигналу (обычно это ошибка регулирования е(t)) вырабатывает управляющее воздействие u(t).
Закон регулирования может быть записан следующим образом
u (t )=ϕ(e(t), KP ,TИ ,ТД ) |
(10.1) |
или, если регулятор линейный, через передаточную функцию |
(10.2) |
u(t) =Wр (s, KP ,TИ ,ТД )e(t) |
В последних формулах KP ,TИ ,ТД – настроечные параметры регулятора. Обычно их число не
превышает трех.
Настроечные параметры современных регуляторов изменяются в широких пределах. Так, например, один из настроечных параметров – время интегрирования TИ может изменяться от 1до
10000 секунд. Это позволяет использовать один и тот же закон регулирования для различных процессов – малоинерционных, сильно инерционных и т.д.
Подбирая настройки регулятора можно обеспечить желаемый процесс регулирования. Существуют адаптивные регуляторы, которые изменяют свои настройки с изменением характеристик объектов.
Все законы регулирования можно разделить на 2 класса:
1.Релейные (позиционные, дискретные).
2.Непрерывные.
3.1Позиционные законы регулирования.
Существуют несколько релейных законов: 1) двухпозиционный регулятор
а)
B, |
e > 0 |
u = |
e < 0 |
−B, |
б)
B, |
e > 0 |
|
u = |
0, |
e < 0 |
|
||
В двухпозиционных регуляторах управляющее воздействие u (t) принимает два значения «1» и «0» или «включено»/ «выключено», клапан открыт – закрыт.
Простейший позиционный регулятор используется в электрическом утюге. В таких регуляторах наблюдаются не затухающие колебания. Действительно, при включении утюга его температура ниже заданной ( утюг холодный) на спираль подается напряжение 220В. Когда температура достигнет заданного значения, напряжение отключается, но по инерции температура продолжает расти и лишь спустя некоторое время начнет уменьшаться. Через некоторое время
температура станет ниже заданной и после включения утюга некоторое время будет по инерции уменьшаться и т. д. – возникнут незатухающие колебания.
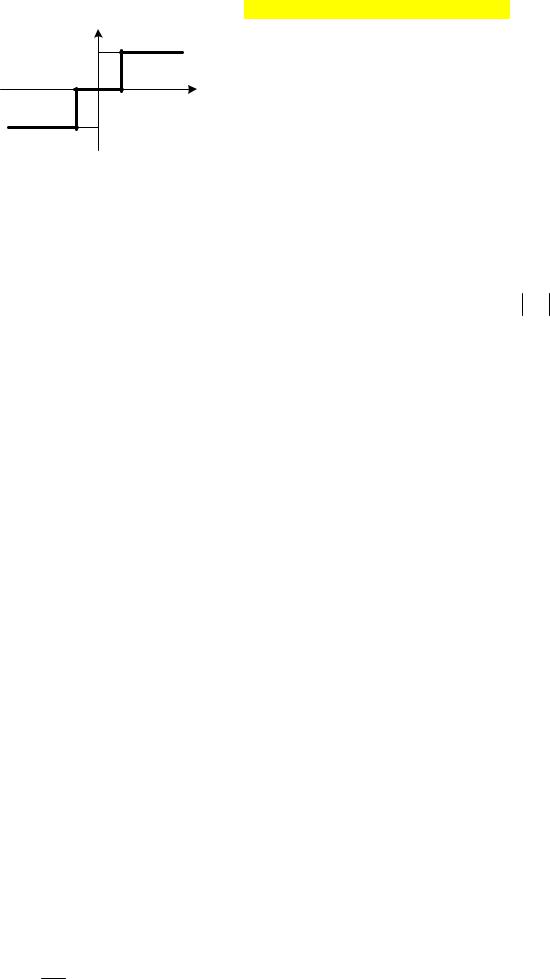
2) Трехпозиционный регулятор (регулятор с зоной нечувствительности)
B, |
e >δ |
|
|
0, |
−δ < e <δ |
u = |
||
|
|
e < −δ |
−B |
||
Трехпозиционный регулятор характеризуется настраиваемой зоной нечувствительности (-δ, δ). Такой регулятор, как правило, используется для включения / выключения реверсивного элетродвигателя, упрвляющего степенью открытия клапана или задвижки. Когда величина ошибки регулирования в зоне нечувствительности (-δ, δ) двигатель обесточен, клапан неподвижен. Если же ошибка выходит за пределы зоны нечувствительности двигатель начинает вращаться в ту или другую сторону открывая / закрывая клапан. Наличие зоны нечувствительности позволяет
избежать незатухающих колебаний, но в АСР возникает статическая ошибка eуст ≤δ .
3.2 Непрерывные законы регулирования.
Известны 5 типовых законов регулирования. Рассмотрим их характеристики. Напомним, что входным сигналом регулятора является ошибка регулирования e(t) , выходным – управляющее
воздействие u(t) .
1) Пропорциональный регулятор или П-регулятор |
|
Дифференциальное уравнение: |
|
u(t) = K р∆e(t) +u0 , |
(10.3) |
где K р – коэффициент передачи регулятора, его настроечный параметр
u0 – начальное значение управляющего воздействия (начальное положение клапана), так
называемая контрольная точка.
Настройка регулятора на процесс, как правило, осуществляется в ручном режиме. Оператор изменяет положение клапана до тех пор, пока регулируемая величина y(t) не станет равной
заданному значению, а ошибка регулирования e(t) равной нулю. Управляющее воздействие
(положение клапана) в этом случае и есть u(t) =u0 . |
После |
чего регулятор |
переводится в |
автоматический режим работы. Перенесем u0 в левую |
часть |
(10.3), получим |
уравнение П– |
регулятора в отклонениях |
|
|
|
∆u(t) = K р∆e(t) , |
|
|
(10.4) |
где ∆u(t) – отклонение управляющего воздействия от начального значения. |
|
||
Как видим П– регулятор представляет собой усилительное звено с передаточной функцией |
|||
Wр (s) = K р |
|
|
(10.5) |
Управляющее воздействие П– регулятора пропорционально ошибке регулирования.
АСР с П - регулятором является одной из наиболее быстродействующих. Однако, в системах с . П – регулятором, как правило, имеется статическая ошибка. Это хорошо видно на примере статической АСР уровня, рассмотренной в разделе 1.3.2. Действительно, если на объект подействовало возмущение, то для его компенсации регулятор должен переметить клапан в новое положение. Но перемещение клапана согласно уравнению (10.4) произойдет только при возникновении ошибки регулирования.
В технических руководствах используется другая форма записи уравнений П-регулятора
∆u = |
100 |
∆e |
(10.6) |
|
|
PB |
|||
|
|
|
|
|
PB% = 100 - предел пропорциональности, выражаемый в процентах.
K р
В отечественных руководствах он называется диапазоном дросселирования и обозначается.
|
D% = |
100 |
|
|
|
(10.7) |
|||||
|
|
K р |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
Тогда |
K р = |
100 |
|
= |
100 |
(10.8) |
|||||
|
|
PB |
|
|
D |
||||||
|
|
|
|
|
|
|
|
||||
Предел пропорциональности является настроечным параметром П - регулятора. Статическая характеристика регулятора приведена на рис.10.3
u,%
100%
u0 |
AB%=PB% |
|
|
A y=x B |
y,% |
Рис. 10.3. Статическая характеристика П - регулятора
Точке у =х соответствует управляющее воздействие (степень открытия клапана) u(t) =u0 . Отрезок
АВ численно равен значению PB%. Когда ошибка регулирования изменяется в интервале АВ, перемещение клапана пропорционально величине ошибки. Отсюда и название. За пределами интервала АВ клапан достигает крайних положений, наступает насыщение.
Значение PB (или D) показывает на сколько % должна измениться ошибка регулирования, чтобы клапан переместился из одного крайнего положения в другое (на 100%).
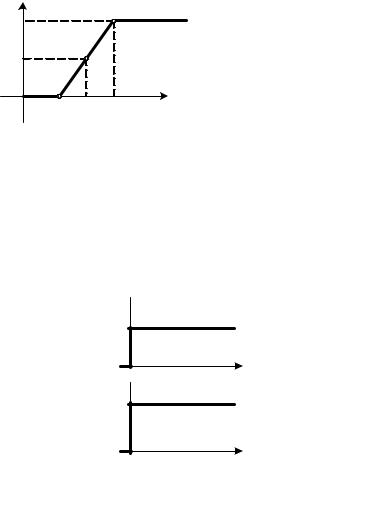
Переходная характеристика П-регулятора, рис.10.4, – характеристика усилительного звена  x(t)=1(t)
x(t)=1(t)
1
t
 y(t)=h(t)
y(t)=h(t)
K
t
Рис. 10.4. Переходная характеристика П- регулятора
2) Интегральный регулятор – И - регулятор
Уравнение регулятора
u(t) = |
1 |
∫t |
∆e(t)dt +u0 , |
(10.9) |
T |
||||
|
И 0 |
|
|
|
гдеTИ - время интегрирования – настроечный параметр И - регулятора
В интегральном регуляторе управляющее воздействие пропорционально интегралу от
ошибки регулирования. Перенося u0 влево |
и |
дифференцируя (10.9) по |
времени, получим |
|||||||||||
дифференциальное уравнения И- регулятора |
|
|
|
|
|
|
|
|
|
|||||
|
d∆u(t) |
= |
1 |
|
∆e(t) |
|
|
|
|
(10.10) |
||||
|
dt |
T |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
И |
|
|
|
|
|
|
|
|||
Отсюда легко находим передаточную функцию И- регулятора |
|
|
|
|
|
|||||||||
W (s) = |
|
1 |
|
= |
K0 |
. |
|
|
|
|
(10.11) |
|||
|
T s |
|
|
|
|
|
||||||||
|
|
|
|
|
s |
|
|
|
|
|
||||
|
|
|
И |
|
|
|
|
|
|
1 |
|
|
||
Иногда при расчетах вместо T используется коэффициент усиления K |
|
= |
. |
|
||||||||||
0 |
|
|
||||||||||||
И |
|
|
|
|
|
|
|
|
|
TИ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из формулы (10.10) следует, что скорость перемещения клапана пропорциональна ошибке регулирования. И, таким образом, клапан может находиться в статическом состоянии (скорость равна нулю), только если ошибка регулирования равна нулю.
Отсюда следует важный вывод. В системах с И – регулятором статическая ошибка равна нулю. В некоторых случаях бывают исключения. Однако длительность переходного процесса в АСР с И- регулятором существенно больше чем в системах с П – регулятором.
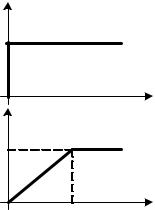
Переходную функцию И – регулятора легко определить, подставив в (10.9) х(t) = 1.
|
1 |
t |
t |
|
|
u(t) = |
|
∫1 dt = |
|
= K0t |
(10.12) |
T |
T |
||||
|
И 0 |
И |
|
|
|
Уравнение (10.12) описывает движение клапана с постоянной скоростью, рис 10.5. При t =TИ из
(10.12) получаем u =1 |
или 100%. |
e |
|
1 |
|
u |
t |
1 |
|
TИ t
10.5. Переходная характеристика И- регулятора
Таким образом, время интегрирования TИ численно равно времени перемещения клапана из
одного крайнего положения в другое, когда ошибка регулирования равна 1 или 100%.
В некоторых промышленных регуляторах значение TИ можно изменять в пределах от 1 до 10000 сек. Чем выше инерционность объектов, тем большее значение TИ устанавливается в регуляторе.
3) Пропорционально-интегральный регулятор – ПИ-регулятор
Уравнение регулятора
|
1 |
t |
|
|
|
u(t) = KР e(t) + |
∫e(t)dt |
(8.13) |
|||
T |
|||||
|
И |
0 |
|
|
|
Здесь и далее символ ∆в уравнениях регуляторов для упрощения записи опускаем.
ПИ – регулятор можно рассматривать как |
параллельное соединение П– и И – регуляторов, а |
||||||||||||||||
выходной сигнал как сумму двух составляющих |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
uПИ (t) = uП (t) +uИ (t) |
|
|
|
|
(10.14) |
|||||
Передаточная функция находится как сумма передаточных функций П– и И – регуляторов |
|||||||||||||||||
|
|
|
|
|
|
|
W (s) = KP + |
|
KP |
. |
|
|
|
|
(10.15) |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
TИ s |
100 |
|
|
|
|
|||
ПИ – регулятор имеет два настроечных параметра PB = |
(или K р = |
100 |
) и Т |
И . При расчетах |
|||||||||||||
K р |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PB |
|
||
настроек часто используется другая форма записи передаточной функции |
|
||||||||||||||||
|
|
|
|
|
|
|
W (s) = K + |
K0 |
, |
|
|
|
|
(10.16) |
|||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
P |
1 |
|
s |
|
|
|
|
|
||
|
|
|
|
|
|
KP |
|
|
|
|
|
|
|
|
|||
где K = K |
P |
, |
K |
0 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
|
|
|
TИ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Структурная схема и переходная характеристика ПИ – регулятора приведены на рис.10.6.
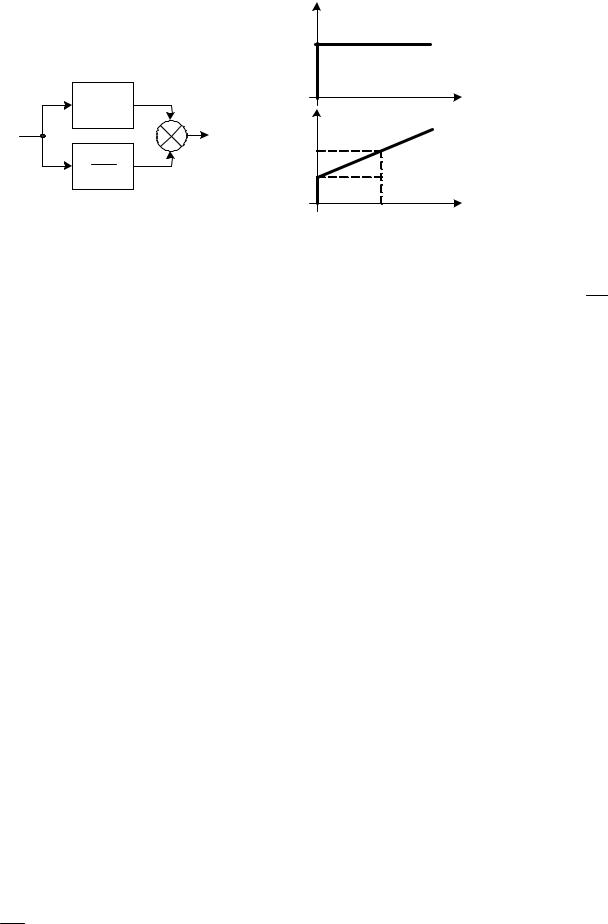
KP
а)
KP
TИ s
e |
|
1 |
|
u |
t |
б) |
|
2КР |
|
КР |
|
TИ |
t |
Рис. 10.6. Структурная схема – а) и переходная функция – б) ПИ - регулятора При воздействии на вход единичной функции , рис. 10.6-б, клапан под действием П- части сначала
скачком перемещается на величину KP , а затем перемещается с постоянной скоростью KP под
TИ
действием И – части. За время равное TИ клапан перемещается на величину 2 KP . Поэтому время интегрирования TИ можно определить по переходной кривой как время удвоения начального
скачка. ПИ – регулятор сочетает достоинства П- регулятора – быстродействие и И- регулятора
– отсутствие статической ошибки.
4)Дифференциальный регулятор – Д-регулятор
Д– регулятор является идеальным дифференцирующим звеном. Уравнение регулятора
u(t) =T |
Д |
de |
(10.17) |
|
dt |
|
где TД - время дифференцирования – настроечный параметр. Передаточная функция регулятора
W (s) =TД s = K2 s |
10.18) |
Управляющее воздействие Д – регулятора пропорционально скорости изменения ошибки регулирования. Поэтому в статическом режиме выходной сигнал Д - регулятора всегда равен нулю. Клапан полностью открыт или закрыт, а регулируемая величина принимает некоторое вполне определенное значение, не зависящее от задания. АСР с Д-регулятором не работоспособна и на практике не используется.
Переходная характеристика Д – регулятора представляет собой δ - функцию площадью равной TД и приведена в разделе дифференцирующие звенья.
5) Пропорционально - дифференцальный регулятор – ПДрегулятор
ПД – регулятор можно рассматривать как параллельное соединение П- и Д – регуляторов
|
de |
|
|
|
u(t) = KP e(t) +TД |
|
, |
|
(10.19) |
|
|
|||
|
dt |
|
|
|
а выходной сигнал как сумму П- и Д- составляющих |
|
|
|
(10.20) |
uПД (t) = uП (t) +uД (t) |
|
|||
Передаточная функция находится как сумма передаточных функций |
|
(10.21) |
||
W (s) = KP + KPTД s = K1 + K2 s |
|
|||
ПДрегулятор имеет два настроечных параметра предел пропорциональности |
PB = |
100 (или |
||
|
|
|
|
K р |
K р = 100PB ) и время дифференцирования ТИ , которые могут изменяться в широких пределах.
Эквивалентная структурная схема и переходная функция ПД - регулятора приведены на рис.10.7 При подаче на вход ПД – регулятора единичной функции, возникает импульс в виде δ - функции,
обусловленной Д-частью и постоянное воздействие – реакция П- части, рис. 10.7.б.
e |
|
1 |
|
KP |
|
u |
t |
KPTД s |
|
КР |
|
а) б) t
Рис.10.7. Структурная схема – а) и переходная характеристик - б) ПДрегулятора
В АСР с ПДрегулятором имеется статическая ошибка (нет интегральной составляющей), однако она может быть значительно меньше, чем в случае АСР с П- регулятором Кроме того ПДрегулятор является самым быстродействующим. За счет Д-части происходит
существенное улучшение качество регулирования. Д-часть измеряет скорость изменения ошибки, то есть прогнозирует ход процесса. Допустим, что при увеличении степени открытия клапана ошибка уменьшается. Тогда, если в некоторый момент времени ошибка возрастает, то, очевидно, следует энергичнее приоткрывать клапан, если убывает, то, наоборот сильнее прикрывать, так как ошибка уже уменьшается. П – регулятор в обоих случаях будет реагировать одинаково – реагирует только на ошибку не учитывая скорости ее изменения. Иначе будет реагировать ПД – регулятор. Действительно, если ошибка возрастает – скорость изменения e(t) положительна – к П-
составляющей будет прибавляться положительная составляющая Д-части. Если же ошибка убывает – скорость отрицательна – Д – составляющая вычитается из П- части и управляющее воздействие уменьшается. Таким образом, за счет прогнозирования (упреждения) хода процесса в АСР с ПД – регулятором обеспечивается более высокое качество регулирования. В реальных (промышленных) регуляторах дифференциальная часть реализуется с помощью реального дифференцирующего звена, а при расчетах используется идеальный дифференциатор.
5) Пропорционально – интегрально – дифференциальный регулятор – ПИДрегулятор
ПИД – регулятор можно рассматривать как параллельное соединение П -, И- и Д- регуляторов. Уравнение ПИД – регулятора
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
t |
|
de |
|
|
|
|
|
|
||
|
u(t) = KP e(t) + |
|
|
|
|
|
∫e(t)dt +TД |
|
= uП (t) +uИ (t) +uД |
(t) |
|
(10.22) |
|||||||||||||
|
T |
|
|
|
dt |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
И 0 |
|
|
|
|
|
|
|
|
|
||||
Передаточная функция находится как сумма передаточных функций П -, И- и Д- регуляторов |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
WПИД (s) = |
KP 1+ |
|
+TД s = |
|
|
|
|
|
|
|
|
|||||||||||||
|
TИ s |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
= K |
P |
+ |
KP |
|
1 |
+ K |
P |
T |
Д |
s =W (s) +W (s) +W |
Д |
(s) |
|
|
(10.23) |
|||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
TИ |
|
s |
|
|
|
П |
И |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
При расчетах часто используется более компактная форма записи передаточной функции |
|
|
|||||||||||||||||||||||
|
W (s) = K + |
K0 |
+ K |
2 |
s |
|
|
|
|
|
|
|
(10.24) |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
1 |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
||
ПИД – регулятор имеет три настроечных параметра предел пропорциональности |
PB = |
(или |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K р |
|
K р = |
100 ) , время интегрирования |
|
ТД |
и время |
дифференцирования |
ТИ и |
сочетает |
все |
|||||||||||||||||
|
PB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
положительные свойства П -, И- и Д- регуляторов – высокое быстродействие и отсутствие статической ошибки. Эквивалентная структурная схема и переходная характеристика ПИД – регулятора приведены на рис.10.8.
Переходная характеристика, рис.10.8-б, состоит из трех составляющих.
|
e |
|
|
KP |
1 |
|
|
|
|
||
KP |
u |
t |
|
TИ s |
|||
|
|
KPTД s |
КР |
|
а) |
б) |
t |
|
Рис.10.8. Структурная схема – а) и переходная характеристик - б) ПИДрегулятора
В начальный момент времени возникает импульс в виде δ - функции площадью равной KPTД –
реакции Д-части на единичную функцию, а под действием П- части клапан скачком перемещается на величину KP , а затем перемещается с постоянной скоростью под действием И – части. В
промышленных регуляторах Д-часть реализуется с помощью реального дифференцирующего звена
W (s) = |
KPTД s |
|
, |
(10.25) |
|
γTД s +1 |
|||||
|
|
|
|||
где γ может изменятся в пределах от 0.05 до 0.125. Тогда вместо δ - функции возникает экспоненциальный импульс амплитудой KγP = (8 ÷20)KP .
4 Анализ качества АСР
Любая АСР должна быть устойчивой. Устойчивость – это необходимое, но недостаточное условие работоспособности АСР. Помимо устойчивости система регулирования должна обладать некоторыми показателями качества. Под понятием качества понимается совокупность требований, предъявляемых к переходным и установившимся процессам АСР. Сами же требования к
качеству регулирования определяются требованиями технологического процесса.
Для оценки качества существует специальные показатели или критерии качества – это некоторые числовые характеристики, с помощью которых характеризуется переходный и
установившийся процесс.
При оценке качества регулирования возникают определенные проблемы. В процессе работы на АСР действуют различные возмущения – случайные и детерминированные сигналы различной формы и амплитуды. Характер изменения этих возмущений, как правило, не известен. С одними возмущениями система может справляться удовлетворительно, с другими значительно хуже. Можно получить хорошее качество регулирования по каналу управления и не удовлетворительное по каналу возмущения и наоборот. С другой стороны для систем стабилизации основной задачей является подавление возмущений, а для следящих систем отработка задания.
Обычно параметры настройки регулятора рассчитывают для наиболее тяжелого возмущения. Считается, что при таком подходе система должна успешно подавлять все остальные возмущения. Наиболее тяжелым возмущением очень часто считают скачкообразное воздействие. Поскольку реакция на единичное скачкообразное воздействие есть переходная кривая, то качество регулирования чаще всего оценивают по переходной кривой.
4.1 Прямые и косвенные критерии качества
Все показатели качества делятся на две группы:
•прямые показатели качества
•косвенные показатели качества
Прямые показатели позволяют оценивать качество непосредственно по кривой переходного процесса и, таким образом, требуют ее построения. Они наглядны и удобны для применения. Как правило, построение переходных процессов связано с затратами времени даже при использовании вычислительной техники. Кроме того. по переходной кривой трудно оценить влияние параметров АСР (настроек регулятора) на показатели качества (вид переходной кривой).
Косвенные показатели (критерии) не требуют построения переходных кривых, и во многих случаях, позволяют оценивать влияние параметров системы на качество
регулирования, выбирать оптимальные параметры . В этом заключается одно из их основных достоинств
На практике комбинируют применение прямых и косвенных показателей: по косвенным показателям определяют оптимальные параметры регулятора, а на заключительном этапе строят переходные кривые и оценивают прямые показатели качества.
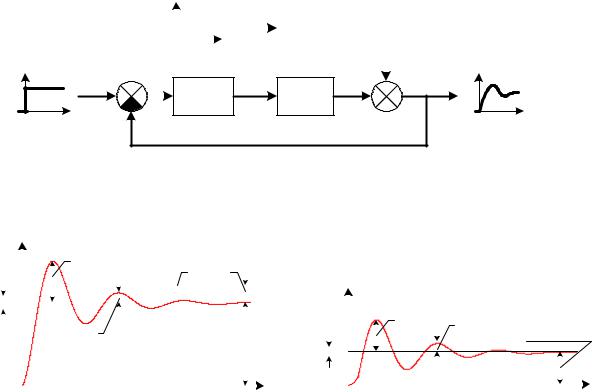
4.2 Прямые критерии качества.
Как уже отмечалось, прямые критерии качества оцениваются по переходной кривой АСР по задающему и/или возмущающему воздействиям, рис. 11.1.-11.3.
|
|
|
|
f(t) |
Wв(s) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
по возмущению |
|
|
|||||
|
|
||||||
|
|
|
|
|
|
|
|
x(t) |
e(t) |
Wр(s) |
u(t) |
Wу(s) |
y(t) |
по заданию |
|
|
|
|
|
Рис.11.1. К определению показателей качества
Для оценки качества по переходной кривой используются следующие показатели, рис.11.2.
2? |
|
|
|
|
A1 |
|
x |
eуст |
|
|
|
|
|
|
|
hВ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
A3 |
hВуст=-eуст |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
A3 |
|
|
hЗуст |
|
|
|
2? |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
t |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tр |
|
|
|
|
|
|
|
|
|
|
|
|
Tр |
|
|
|
|
||
|
|
|
а) Переходная кривая по заданию |
б) Переходная кривая по возмущению |
|||||||||||||||||||||
|
|
|
|
|
Рис. 11.2. Переходные характеристики замкнутой АСР |
|
|
|
|
|
|
||||||||||||||
1. Статическая (установившаяся) ошибка |
|
|
(11.1) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
eуст = xуст − yуст |
|
|
|||||||||||||||
2. Перерегулирование – максимальное относительное отклонение регулируемой величины
σ = |
A1 |
100% |
(11.2) |
|
|||
|
yуст |
|
|
Перерегулирование 15 – 20% обычно считается приемлемым. В некоторых случаях перерегулирование не допускается. Перерегулирование определяется только для процессов по задающему воздействию, так как установившаяся ошибка по возмущающему воздействию может равняется нулю (в астатических АСР).
3. Степень затухания – характеризует интенсивность затухания переходного процесса

ψ = |
A1 − A3 |
=1− |
A3 |
. |
(11.3) |
A |
|
||||
|
|
A |
|
||
|
1 |
|
1 |
|
|
Степень затухания для устойчивых систем изменяется в пределах: 0 <ψ ≤1 .
Случай ψ = 0 соответствует A3 = A1 – незатухающим колебаниям. |
|
Случай ψ =1 соответствует A3 = 0 – одно полуколебание. |
|
На практике рекомендуется |
|
ψопт = 0,75...0,9 |
(11.4) |
4. Время регулирования Tр – время, по истечении которого отклонение |
регулируемой |
величины от своего установившегося значения не превышает некоторой наперед заданной величины ∆.
Для процессов по заданию обычно принимают ∆ = 5%hуст , т.е. устанавливается 5% зона. Для процессов по возмущению обычно ∆ = 5%hmax , так как hуст может равняться нулю.
Другие критерии: время достижения первого максимума, число полуколебаний и др.
4.3 |
Косвенные показатели (критерии) качества |
|
Косвенные показатели (критерии) делятся на три группы. |
• |
Интегральные |
• |
Корневые |
• |
Частотные |
1. Интегральные критерии качества
Ошибка регулирования
e(t) = x(t) − y(t) |
(11.5) |
Рассмотрим переходный процесс в замкнутой АСР относительно ошибки регулирования,
рис. 11.3-а.
e |
eп |
eуст |
|
t |
t |
а) |
б) |
Рис. 11.3. К определению интегральных критериев качества
Очевидно, что чем меньше площадь под кривой, тем выше качество регулирования. При теоретических расчетах площадь S удобно вычислять при изменении времени от 0 до ∞:
S = ∞∫e(t)dt . |
(11.6) |
0 |
|
При наличии установившейся (статической) ошибки, площадь с ростом времени будет стремиться к бесконечности. Поэтому вместо ошибки регулирования e(t) рассматривают переходную
составляющую ошибки eп(t)
eп (t) = e(t) −eуст |
(11.7) |
Площадь под кривой eп(t) конечна, рис. 113-б, и может служить мерой качества системы. Причем
интегральные критерии могут быть вычислены не только по переходным кривым системы. Рассмотрим наиболее распространенные интегральные показатели (критерии) качества.
1. Линейный интегральный критерий S0
Критерий численно равен площади под графиком переходной ошибки.