

2. Нелинейное программирование Построение одзп, выбор начальной точки поиска
Целевая функция имеет вид:

Вид функции можно посмотреть в пакете Matlab, используя следующую подпрограмму: >> [x1,x2]=meshgrid([-10:0.1:10]); >> F=3*x1.^2+4*x2.^2-2*x1.*x2+4*x1+5*x2; >> meshc(x1,x2,F);

Рисунок 2.1 – Вид функции цели
Функция вогнута и имеет минимум.
Построим ОДЗП:

Пусть x1=7, тогда x2=5
Пусть x1=0, тогда x2=1

Пусть x1=7, тогда x2=5
Пусть x1=0, тогда x2=6

Рисунок 2.2 – ОДЗП
Внутри области допустимых значений выбираем точку x0, которая в дальнейшем будет являться начальной в процессе поиска экстремума:
x0=(4;4).
2.1 Нахождение экстремального значения функции f(X) без учета ограничений на переменные Метод наискорейшего спуска
 =[4;4]
=[4;4]
В методе наискорейшего спуска очередная точка при поиске минимума функции вычисляется по формуле:

где направление
движения задается вектором градиента
 функции F(x),
вычисленном в точке
функции F(x),
вычисленном в точке
 ,
а величина шага перемещения определяется
числовым параметром
,
а величина шага перемещения определяется
числовым параметром
 .
.
Найдем градиент :

 .
.
На первом шаге движение осуществляется из точки вдоль вектора
- в новую точку
в новую точку
 :
:

В еличина
шага
на любом шаге выбирается из условия
обеспечения экстремума функции в
рассматриваемом направлении. Подставляя
координаты точки
в функцию
еличина
шага
на любом шаге выбирается из условия
обеспечения экстремума функции в
рассматриваемом направлении. Подставляя
координаты точки
в функцию
 ,
получим:
,
получим:

Из условия:
 ;
;
найдем
 :
:

 ;
;

В результате после первого шага координаты очередной точки получаются равными:

Вычисляем

На втором шаге движение осуществляется в направлении вектора
- :
:

Подставив полученные выражения для x12 и x22 в функцию цели и преобразовав, из условия
 ;
;
найдем
 :
:

 ;
;
Тогда:

В результате после второго шага координаты очередной точки получаются равными:

Вычисляем
 :
:

На третьем шаге движение осуществляется в направлении вектора
- :

Подставив полученные выражения для x12 и x22 в функцию цели и преобразовав, из условия:
 ;
;
найдем
 :
:

 ;
;
В результате после третьего шага координаты очередной точки получаются равными:


На третьей итерации закончим вычисления, значение функции цели:

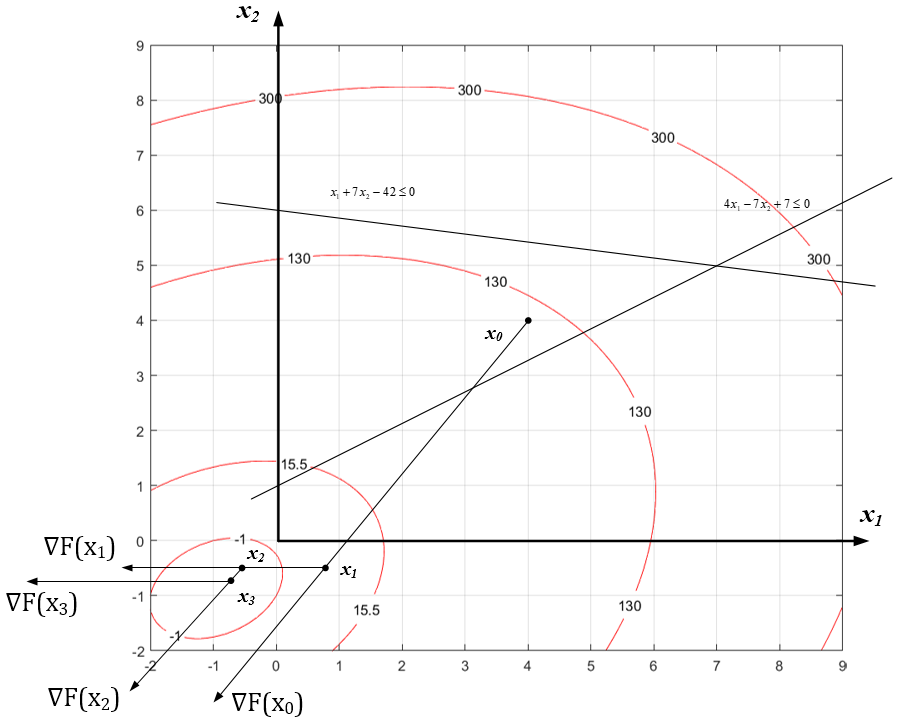
Рисунок 2.3 – Графическая интерпретация метода наискорейшего спуска
Метод Ньютона-Рафсона
Условие задания:
=[4;4]
Данный метод дает решение задачи за 1 шаг. Очередная точка поиска вычисляется в соответствии с выражением:

где
 – матрица Гессе функции
;
– матрица Гессе функции
;
 – обратная по отношению к
матрица.
– обратная по отношению к
матрица.
Градиент F(x):
;
.


где det H – определитель матрицы H; AdjH – присоединенная к H матрица (транспонированная матрица алгебраических дополнений).
Найдем определитель матрицы Гессе:

Найдем транспонированную матрицу алгебраических дополнений AdjH:
Теперь найдем матрицу обратную по
отношению к
 - матрицу
- матрицу
 :
:

тогда:


Следовательно,
в точке
 функция
F(x)
достигает экстремального
значения:
функция
F(x)
достигает экстремального
значения:


Рисунок 2.4 – Графическая интерпретация метода Ньютона-Рафсона