

Часть2, рефераты / Вопросы / vopros_10
.docx(вопрос 10) Исполнительный двигатель постоянного тока. Якорное управление.
В исполнительных двигателях постоянного тока обмотки якоря и главных полюсов питаются от двух независимых
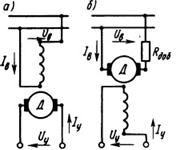
Рис. 1. Схемы включения исполнительных двигателей постоянного тока при якорном (а) и полюсном (б) управлении
источников тока. Одна из них (условно называемая обмоткой возбуждения) подключена постоянно к источнику с неизменным напряжением Uв, а на другую (обмотку управления) подают напряжение управления Uy только при необходимости вращения вала двигателя. В зависимости от того, на какую обмотку подают управляющий сигнал, различают два способа управления исполнительными двигателями (рис. 1): якорное и полюсное.
В некоторых случаях применяют исполнительные двигатели с постоянными магнитами, в которых управляющий сигнал подают на обмотку якоря.
Исполнительные двигатели работают в переходном режиме; для них характерны частые пуски, остановы и реверсы.
Двигатель с якорным управлением. В этом двигателе (рис. 1, а)напряжение управления Uy подают на обмотку якоря; обмотка главных полюсов присоединена к сети постоянного тока с неизменным напряжением UB. Следовательно, коэффициент сигнала α=Uy/UB. Для двигателей с постоянными магнитами α=Uy/UHOM.
Когда напряжение Uy = 0, ток в обмотке якоря Iу и вращающий момент двигателя Μ равны нулю, и, следовательно, самоход двигателя исключается. Изменяя напряжение Uy, можно регулировать частоту вращения двигателя. Магнитная цепь исполнительных двигателей выполняется ненасыщенной, поэтому при UB = const магнитный поток Ф = kфUв, где kф— постоянная, зависящая от параметров обмотки возбуждения (сопротивления и числа витков) и сопротивления магнитной цепи машины.
Ток якоря
![]() (1)
(1)
где Е=сеФп = сеkфUвп — ЭДС, индуцированная в обмотке якоря; Ry = ΣRa—сопротивление якоря.
Следовательно, вращающий момент двигателя М= = смkфUв1у или, с учетом (1),
![]() (2)
(2)
Причем за базовую единицу момент Мк, развиваемый двигателем при n= 0 и α = 1: Μκ = смkфU2B/ΣRa. Тогда относительное значение момента
![]() (3)
(3)
Частота вращения при холостом ходе двигателя и α = 1
![]() (4)
(4)
а относительная частота вращения
![]() (5)
(5)
Таким образом, уравнение механической характеристики принимает вид
![]() (6)
(6)
Из (6) следует, что механические характеристики двигателя при различных значениях α прямолинейны и параллельны (рис. 2, а). Решая (6) относительно ν, получаем уравнение регулировочной характеристики
![]() (7)
(7)
Регулировочные характеристики при различных значениях т также прямолинейны и параллельны (рис. 2,б). Мощность управления
![]() (8)
(8)
Приняв за базовую единицу мощность управления при коротком замыкании и α=1, т.е. Py.K=U2в/ΣRa, получим мощность управления в относительных единицах
![]() (9)
(9)
Следовательно, мощность управления ру резко возрастает с увеличением коэффициента сигнала (рис. 3, а).
Мощность возбуждения PB=UBIB=U2в/RB при якорном управлении постоянна и не зависит от α и ν.
Механическая мощность исполнительного двигателя в относительных единицах представляет собой произведение относительной частоты вращения на относительный момент:
![]() (10)
(10)
Максимальную механическую мощность рмехтах и соответствующую частоту вращения νκρ можно определить, положив dpMex/dv = 0. При этом получим
PМЕХТАХ = α2/4; νκρ = 0,5α = 0,5νο. (11)
На рис. 3,6 показаны зависимости PMex=f(v) при различных значениях коэффициента сигнала. Максимум механической мощности пропорционален α2, поэтому работа при малых α приводит к плохому использованию номинальной мощности двигателя. Следовательно, при якорном управлении управляющее устройство, подающее на двигатель

Рис. 2. Механические (а) и регулировочные (б) характеристики
двигателя с якорным управлением
сигнал управления Uy, должно иметь достаточно большую мощность.

Рис. 3. Зависимости мощности управления (а) и механической мощности (б)
от частоты вращения при якорном управлении